
毕业论文-视觉导航智能车姿态控制系统设计与实现
64页
1、杨云鹏:视觉导航智能车姿态控制系统设计与实现毕业设计(论文) 题 目 视觉导航智能车姿态 控制系统设计与实现专 业 自动化 班 级 自 115 学 生 指导教师 2015 年 视觉导航智能车姿态控制系统设计与实现摘 要近年两轮自平衡电动车得到了很大的发展,因为其具有灵活、便利、节能等特点。全国大学生“飞思卡尔”杯智能汽车竞赛中的摄像头平衡组比赛要求是:让智能车模仿两轮电动平衡车的运行方式,让智能车仅用两个后轮驱动实现直立行走。 本课题以第九届全国大学生“飞思卡尔杯”智能汽车竞赛为背景,使用IAR编程软件对直立智能车进行软件开发。本文详细论述了智能车的各个模块的工作原理、电路图、机械安装以及控制算法。其中详细的开发过程,以及期间碰到的各种问题和解决方法都在文中有详细的论述。本系统采用飞思卡尔公司K60单片机作为主控芯片,使用陀螺仪和加速度传感器采集角度信息,光电码盘采集速度信息,分别作为角度反馈和速度反馈,再结合PID控制算法,控制两个电机的转速,最终实现智能车能够直立并能够实现按预期的速度向前运行。关键字:智能车,直立控制,陀螺仪,加速度传感器,K60单片机AbstractIn rec
2、ent years, two self-balancing electric vehicle has been great development, because it is flexible, convenient, energy-saving features. National College Student Freescale Cup smart car race in the camera balance group competition requirements is: Let the smart car to imitate two electric counterbalance vehicle operating mode, make the smart car with only two rear-wheel drive to achieve walk upright.In this paper Ninth National University Freescale Cup Smart Car race background, using the IAR prog
3、ramming software for intelligent vehicle upright for software development. This paper discusses in detail the working principle of each module smart car, schematics, mechanical installation and control algorithms. Which details the development process, as well as a variety of problems and solutions encountered during are discussed in detail in the text.The system uses Freescale K60 MCU as the master chip, using a gyroscope and an accelerometer sensor angle information collection, information gat
4、hering speed optical encoder, respectively, as the angle feedback and velocity feedback, combined with PID control algorithm to control two motors speed, and ultimately achieve smart car can stand and be able to achieve speeds forward as expected.Keywords: smart car, upright control, gyroscope, accelerometer, K60 MCU西安理工大学本科生毕业设计(论文)目 录第1章 绪论11.1 课题背景概述11.2 本文主要工作内容2第2章 视觉导航智能车姿态控制系统总体方案设计32.1 系统总体方案简介32.2 硬件方案32.3 软件方案42.4 本章小结5第3章 视觉导航智能车姿态控制系统硬件设计63.1 车模安装63.1.1 电池安装83.1.2 主控板安装83.1.3 陀螺仪及加速度
《毕业论文-视觉导航智能车姿态控制系统设计与实现》由会员桔****分享,可在线阅读,更多相关《毕业论文-视觉导航智能车姿态控制系统设计与实现》请在金锄头文库上搜索。
乘素质教育之舟.doc
湖南广播电视大学教学团队建设管理办法

拉格朗日龙格现象.doc
郑州名吃汇总.doc

植树节演讲稿汇总九篇
2023年初中班主任工作计划5篇.doc
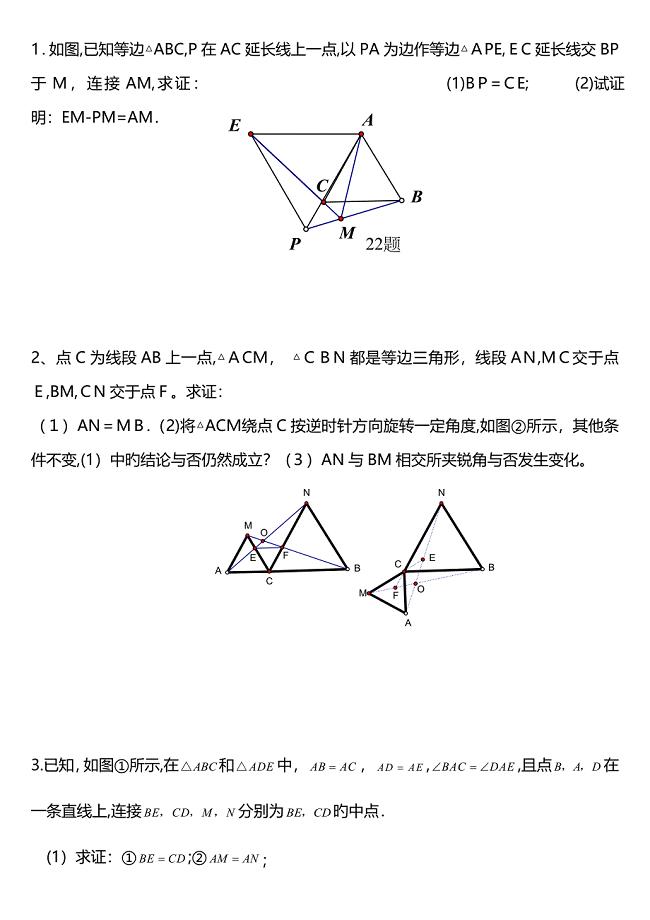
全等三角形难题集锦超级好题汇总
球阀物流与设施规划课程设计报告书
最新点燃读书激情的主题演讲稿5篇(点燃工作激情之演讲稿)
《邮政储汇业务员》初级7试题

三、比较运动的快慢1.doc
国旗下的演讲稿汇编7篇
医学伦理学历史发展技术总结范文ppt.docx
关于奋斗的高三励志标语
吉林省通化县综合高级中学2020-2021学年高二数学下学期期中试题文
生产安全事故应急预案编制情况
施工进度计划及保证措施3.docx
小学生三年级我有一个想法作文【三篇】.docx
“教”与“玩”结合是小学体育教学的有效方法
小篮球:双手胸前传接球1.doc
 毕业设计(论文)-椭圆规的设计与制造(全套图纸三维)
毕业设计(论文)-椭圆规的设计与制造(全套图纸三维)
2023-12-02 17页
防城港市城市中心区主体建筑群5号标段工程施工组织设计
2023-01-18 102页
传统武术项目在中小学开展现状调查研究
2023-11-04 16页
城市水网管道系统课程设计-南方某城镇水管网的扩大初步设计
2022-09-04 38页
毕业设计(论文)-基于web2.0的服装库存系统
2022-09-19 38页
毕业设计(论文)-图书馆信息管理系统的设计与实现
2022-08-15 23页
单片机课程设计-基于单片机的电子琴设计
2022-10-14 17页
安全事故应急救援预案
2022-09-29 10页
机械制造技术课程设计-泵体加工工艺及铣φ20孔端面夹具设计
2024-02-20 38页
《城市水网管道系统》课程设计报告-南方某小城镇给排水管网的扩大初步设计
2023-04-25 16页