
北航机械优化大作业
19页
1、 现代机械优化设计 授课老师: 王春洁 2014-12-7 / 目录第一部分一、一维优化方法2. 进退法2 格点法3。牛顿法24. 二次插值3应用原则:4二、多维无约束优化41. 梯度法42 二阶牛顿法与阻尼牛顿法3。 DF变尺度法6。单纯形法三、 多维约束优化61.随机方向搜索法8可行方向法83。惩罚函数法第二部分一、 采用有约束多维优化方法解决箱梁模板的设计问题011 问题的描述1112 多维约束优化14总结与致谢18参考文献1第一部分 本部分为简述学过的优化算法(一维,多维无约束,多维有约束)的选择方法及应用原则.一、 一维优化方法1. 进退法由单峰函数的性质可知,在极小点左边函数值应严格下降,而在极小值右边函数值应严格上升。因此,可从某一个给定的初始点出发,以初始步长沿着函数值的下降方向,逐步前进(或后退),直至找到相继的3个试点的函数值按“高低-高”变化为止。2 格点法格点法是一种计算极其方便的方法,其迭代步骤可简要概括为把搜索区间等分成n个点,计算各个点对应的数值,取出函数值最小的点的横坐标,之后,在两侧取临点,作为新的区间并判断是否成立,倘若成立,则就是最优解,对应的函数
2、值即为最优值;若不成立则以为新区间重复以上过程直到满足条件为止。3. 牛顿法牛顿法是用切线代替弧,逐渐逼近函数根值的方法.当目标函数有一阶连续导数并且二阶导数大于零时,在曲线上作一系列切线,使之与轴的脚垫逐渐趋于的根。对于一维搜索函数,假定已经给出极小点的一个较好的近似点,在点附近用一个二次函数来逼近函数:然后以该二次函数的极小点作极小点的一个新的近似点。根据极值必要条件:即:可得:依次继续下去可得到牛顿迭代公式:其具体计算步骤概括为:1) 给定初始点,控制误差,并令;2) 计算,;3) 根据牛顿迭代公式求;4) 若则求得近似解,停止计算,否则转到);5) 令转到1). 二次插值二次插值是多项式逼近法的一种。所谓多项式逼近,是利用目标函数在若干点的信息(函数值,导数值等),构成一个与目标函数值很接近的低次插值多项式,然后利用该多项式的最优解作为函数的近似最优解,随着区间的逐次缩短,多项式函数的最优点与原函数最优点之间的距离逐渐减小,直到满足一定的精度要求时迭代终止。设原目标函数在的三个点对应的函数值则可作出如下多项式:多项式的极值点可从极值的必要条件求得:即:又由于:根据以上各式可知:
3、式中:以上是插值法的公式推导过程,根据其基本思想概括其迭代过程如下:1) 确定初始搜索区间,定出初始插值结点;2) 利用式与计算与;3) 终止条件判断l 当时,如果,则为所求的极小点;如果,则为所求的极小点;l 当时,则需比较的大小,以便在中丢掉或,得到新的三点,然后再转2)。应用原则:一维优化算法是求一维目标函数的最优点和最优值.求单变量的极值问题,但是在很多时候函数的求导很困难,甚至根本不可导,而且计算机不擅长求导,求导是用其他算法实现的,计算量大,需要的时间长.所以在优化过程中一般不采用解析法而采取直接探索法求最优点。这种求优方法称为一维优化方法。求解一维的最小值一般分为两步。第一步是确定函数值最小值所在的区间a,称为搜索区间;第二步是在该区间内求出最优步长因子或最优值。确定搜索区间的方法:进退法、外推法。一维最优化算法分有格点法、二次插值法、三次插值法等.格点法结构和程序很简单,但效率偏低;二次插值法和三次插值法的搜索效率较高,收敛速度较快,调用函数次数少。三次插值法的效率比二次插值法更高,在同样搜索次数下,其精度更高,但程序复杂,可靠性差些,对高维数的优化问题更适宜,经过某些
4、技术处理,方法的可靠度可以大为提高。二、 多维无约束优化1。 梯度法函数的梯度方向是函数值增加最快的方向,则负梯度方向必然是函数值下降最快的方向,所以在优化中采取负梯度矢量作为一维搜索的方向,成为最速下降法,也叫一阶梯度法。(此法属于解析法,既间接求优法)梯度法的迭代过程简单,对初始点的选择,要求不高.梯度方向目标函数值下降迅速只是个局部性质,从整体来看,不一定是收敛最快的方向。以二维二次函数为例,相邻两次的搜索方向是正交的,所以搜索路径是曲折的锯齿形的;对于高维的非线性函数,接近极值点处,容易陷入稳定的锯齿形搜索路径.目标函数在点的梯度为:搜索方向为梯度方向:梯度法的迭代公式为:式中:是函数在迭代点处的梯度; 最优化步长.概括其迭代过程为:1) 任选初始迭代点,选定收敛精度,令;2) 确定点的梯度,并确定搜索方向;3) 判断是否满足迭代终止条件,若满足,则给出最优解,否则转向下一步;4) 从出发,沿负梯度方向做一维搜索,求最优步长; 5) 令,返回2)。. 二阶牛顿法与阻尼牛顿法二阶牛顿法与一维搜索方法中的牛顿法类似,只需将其推广到n维。利用二次函数(二次曲线)来逐点去近似或者逼近目
《北航机械优化大作业》由会员博****1分享,可在线阅读,更多相关《北航机械优化大作业》请在金锄头文库上搜索。
学前儿童艺术教育(音乐部分)作业(5-7章)
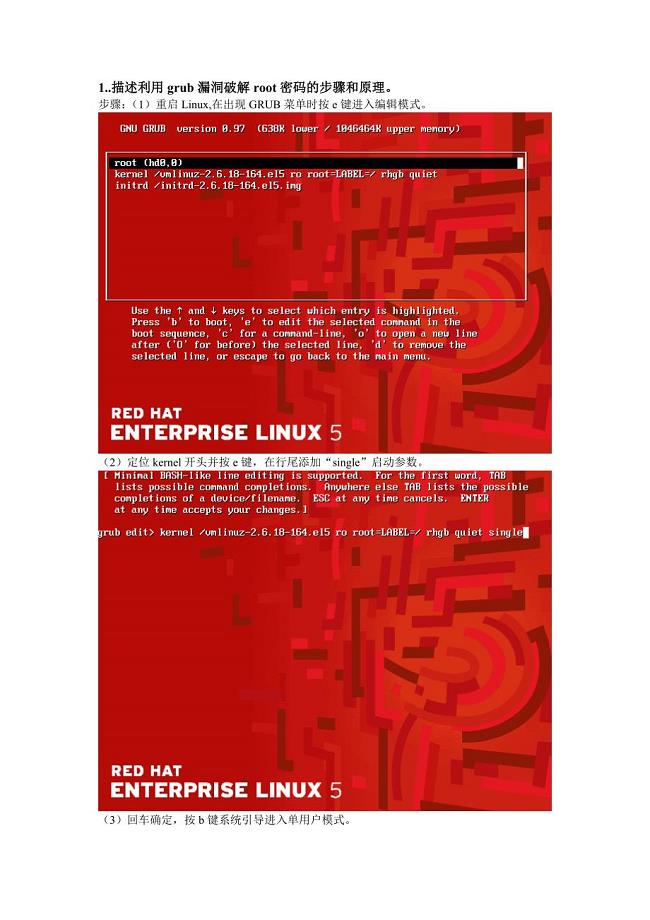
红帽实验及其答案.doc
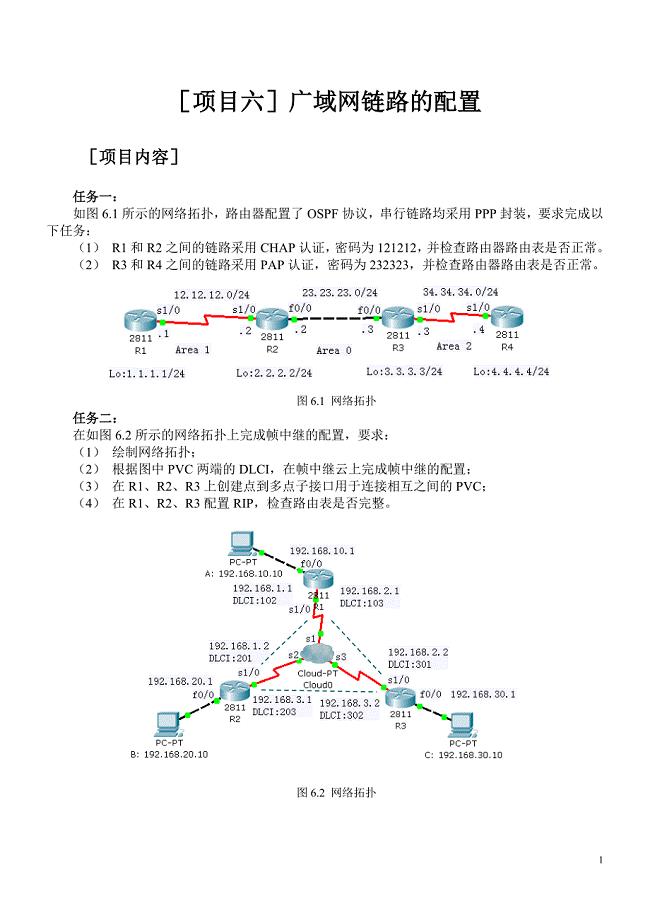
项目六 广域网链路的配置V1.0.doc
竞聘护士长演讲稿.doc
新北师大版五年级数学下7单元用方程解决问题试卷(共2页)

初三导学案5K模板.doc
新人教版四年级语文下册四单元检测及答案.doc

罐笼技术协议~龙祥2013.4.20.doc
离婚协议书格式范文荐读格式版(四篇).doc
人才培养计划之企业优秀实践案例汇编

2023学年湖北省丹江口市数学八年级第一学期期末达标测试试题含解析.doc
2023年道路修复施工合同
2021年新娘父亲答谢词3篇

4.4平行线的判断(2)2.docx
护理质控整改措施
读《学生第二》中第一辑“经营学校文化”.docx
《沉与浮》教学设计.doc
劳务合同书通用样式.doc

四年级上册英语一单元2课时.doc

【教育资料】小学语文三年级教案《赵州桥》教学设计之七.doc
 137承台大体积混凝土专项施工方案(改后)
137承台大体积混凝土专项施工方案(改后)
2023-05-28 27页
2023年秋英语行考电大行考作业答案
2022-09-03 8页
主动脉夹层病人的护理
2023-12-16 8页
教科版三年级上册科学实验报告单三个学校的全[1]
2022-10-30 20页
个人工作总结与自我评价8篇
2023-06-09 10页
五行长生十二宫表
2024-01-19 2页
一 项羽性格分析
2023-09-12 10页
英汉称谓语差异对比研究论文
2023-11-30 11页
降水施工专项方案
2023-01-16 19页
吉林大学21春《组织胚胎学》在线作业二满分答案14
2022-08-03 15页