
毕业设计论文机械手的PLC设计
25页
1、目 录摘 要3引 言41 机械手简介51.1 概述51.2 机械手的组成51.3 机械手的分类51.4 机械手的应用52 机械手的控制方案与选择62.1 控制要求62.2 机械手的控制系统设计方案的比较73 PLC的简介73.1 PLC的产生73.2 PLC的定义和特点73.2.1 PLC的定义73.2.2 PLC的特点83.3 可编程控制器的主要性能指标83.4 可编程控制器的分类83.5 PLC系统的组成93.5.1 PLC的硬件结构93.5.2 PLC的软件93.6 可编程控制器的工作方式103.7 PLC的编程语言103.8 FX2N系列PLC113.8.1 FX2N系列PLC的内部资源113.8.2 FX2N系列PLC的基本顺控指令1139 PLC的应用领域124 PLC对机械手的控制134.1 PLC的选型134.4.1 I/O总点数的确定134.4.2 I/O点信号性质分析134.4.3 用户存储器容量的估算144.2 PLC的梯形图144.2.1程序的总体结构设计144.2.2 初始化程序144.2.3 手动程序154.2.4 回原位程序154.2.5 自动程序164.
2、3 指令程序174.4 I/O接线图184.5相关电气设备选择和校验204.5.1 系统调试204.5.2 程序的运行与调试214.6 材料清单214.7 不足和改进225 毕业设计总结236 致谢24参考文献25摘 要机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、变频器、传感器、等电子器件组成。该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。本文介绍的机械手是由PLC输出三路脉冲,分别驱动横轴、竖轴变频器,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。关键词:机械手 PLC 变频器 交流电机引 言在现代工业中,生产过程的机械化、自动化已成为突出的主题。随着工业现代化的进一步发展
3、,自动化已经成为现代企业中的重要支柱,无人车间、无人生产流水线等等,已经随处可见。同时,现代生产中,存在着各种各样的生产环境,如高温、放射性、有毒气体、有害气体场合以及水下作业等,这些恶劣的生产环境不利于人工进行操作。工业机械手是近代自动控制领域中出现的一项新的技术,是现代控制理论与工业生产自动化实践相结合的产物,并以成为现代机械制造生产系统中的一个重要组成部分。工业机械手是提高生产过程自动化、改善劳动条件、提高产品质量和生产效率的有效手段之一。尤其在高温、高压、粉尘、噪声以及带有放射性和污染的场合,应用得更为广泛。在我国,近几年来也有较快的发展,并取得一定的效果,受到机械工业和铁路工业部门的重视。本课题拟开发物料搬运机械手,采用日本三菱公司的FX2N系列PLC,对机械手的上下、左右以及抓取运动进行控制。该装置机械部分有滚珠丝杠、滑轨、机械抓手等;电气方面由交流电机、变频器、操作台等部件组成。我们利用可编程技术,结合相应的硬件装置,控制机械手完成各种动作。由于时间仓促和个人水平限制,我的设计存在着许多还没来得及解决的问题,希望广大老师、同学能够给予批评指正并予以解决。1 机械手简介1.
4、1 概述机械手首先是由美国开始研制的。1958年美国联合控制公司研制出了第一台机械手。机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。1.2 机械手的组成机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有23个自由度。1.3 机械手的分类机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可
《毕业设计论文机械手的PLC设计》由会员新**分享,可在线阅读,更多相关《毕业设计论文机械手的PLC设计》请在金锄头文库上搜索。
卫生保证书4篇.doc
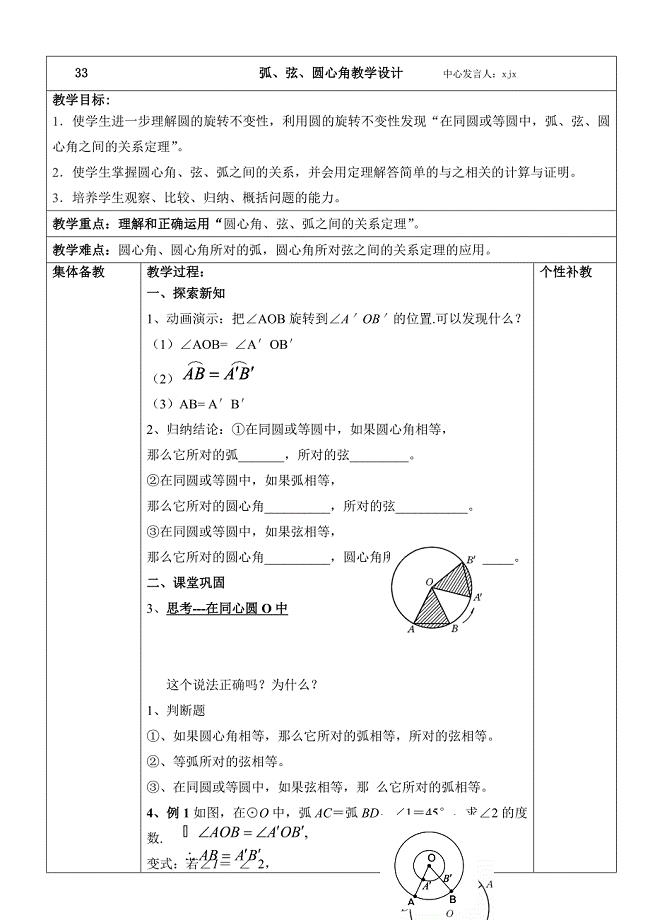
弧弦圆心角教学设计
春游初中作文
2022-2023年管理会计师考试全真模拟试题(200题)含答案提分卷96
2023个人教学经验总结.doc
房地产客服专员工作总结(4篇).doc
小班元旦活动总结,幼儿园元旦活动总结
年级组长个人述职报告精选范文三篇
2018最新学期班主任一句话寄语精编70条
公司租房合同简洁版(九篇).doc
冀教五年级语文下册ABB式词语和四字词语大全
新员工招聘责任保证书
大四社会实践心得体会范文
建设工程施工合同担保协议书
2023会计工作计划格式范文(4篇)
三基试卷医生A
速烧刚玉项目可行性研究报告
区分Activity的四种加载模式
个人货物运输合同书电子版(5篇).doc
管理部门岗位职责
 领班工作总结
领班工作总结
2023-02-09 11页
基于web的在线外卖订餐系统的设计与实现v1.0
2022-12-07 37页
用友T6企业管理软件V5461安装说明
2023-12-17 96页
七年级语文复习第一二五单元及模拟习题人教四年制版知识精讲
2024-02-25 7页
高中地理学习方法指导
2023-10-31 3页
年产5万立方米复合自保温砌块项目可行性分析报告书
2023-12-06 23页
初中物理九年级下册第十四章检测卷
2023-09-12 4页
特种设备种类和定期检验周期一览表
2024-01-16 6页
江苏省镇江市高三第一次模拟考试数学试卷含答案解析
2023-05-15 22页
偏头痛的症状与治疗
2022-11-15 7页