
机械手的设计论文
29页
1、. . . . 机电职业技术学院毕业综合实践报告姓 名 荣庭 专业电气自动化班 级电气自动化三班学 号 2012321308 指导教师 王延盛 2015年3月13日目 录1 机械手的基本介绍11.1 机械手的基本结构组成11.1.1 气动手爪11.1.2 伸缩气缸11.1.3 回转气缸与垫板21.1.4 提升气缸21.2 直线运动传动组件21.3 气动控制回路32 传感器部分52.1 传感器简介52.2 磁性开关52.3 光电传感器和光纤传感器53 伺服电机应用73.1 伺服系统73.2 交流伺服系统的位置控制模式83.3 接线103.4 伺服驱动器的参数设置与调整103.4.1 参数设置方式操作说明103.4.2 面板操作说明:113.4.3 部分参数说明113.5 最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED)123.6 移动包络134 PLC程序编写154.1 PLC的选型和I/O接线154.2 伺服电机驱动器参数设置154.3 编写和调试PLC控制程序164.4 初态检查复位子程序和回原点子程序194.5 急停处理子程序20个人收获23参考文献24附 录25
2、致 28 / 1 机械手的基本介绍1.1 机械手的基本结构组成1.1.1 气动手爪用于在各个工作站物料台上抓取/放下工件。由一个二位五通双向电控阀控制。见图 1-1 图 1-1 气动手爪1.1.2 伸缩气缸用于驱动手臂伸出缩回。由一个二位五通单向电控阀控制。见图 1-2图 1-2 伸缩气缸1.1.3 回转气缸与垫板用于驱动手臂正反向90度旋转,由一个二位五通单向电控阀控制。见图 1-3,图 1-4图 1-3 气动摆台图 1-4 垫板1.1.4 提升气缸用于驱动整个机械手提升与下降。由一个二位五通单向电控阀控制。见图 1-5图 1-5 提升机构1.2 直线运动传动组件直线运动传动组件用以拖动抓取机械手装置作往复直线运动,完成精确定位的功能。抓取机械手装置是一个能实现三自由度运动(即升降、伸缩、气动手指夹紧/松开和沿垂直轴旋转的四维运动)的工作单元,该装置整体安装在直线运动传动组件的滑动溜板上,在传动组件带动下整体作直线往复运动,定位到其他各工作单元的物料台,然后完成抓取和放下工件的功能传动组件由直线导轨底板、伺服电机与伺服放大器、同步轮、同步带、直线导轨、滑动溜板、拖链和原点接近开关、左
3、、右极限开关组成。伺服电机由伺服电机放大器驱动,通过同步轮和同步带带动滑动溜板沿直线导轨作往复直线运动。从而带动固定在滑动溜板上的抓取机械手装置作往复直线运动。同步轮齿距为 5mm,共 12 个齿即旋转一周搬运机械手位移 60mm。抓取机械手装置上所有气管和导线沿拖链敷设,进入线槽后分别连接到电磁阀组和接线端口上原点接近开关和左、右极限开关安装在直线导轨底板上。原点接近开关是一个无触点的电感式接近传感器,用来提供直线运动的起始点信号。左、右极限开关均是有触点的微动开关,用来提供越程故障时的保护信号:当滑动溜板在运动中越过左或右极限位置时,极限开关会动作,从而向系统发出越程故障信号。1.3 气动控制回路输送单元的抓取机械手装置上的所有气缸连接的气管沿拖链敷设,插接到电磁阀组上,其气动控制回路如图 1-6 所示。图 1-6 输送单元气动控制回路原理图在气动控制回路中,驱动摆动气缸和气动手指气缸的电磁阀采用的是二位五通双电控电磁阀。双电控电磁阀与单电控电磁阀的区别在于,对于单电控电磁阀,在无电控信号时,阀芯在弹簧力的作用下会被复位,而对于双电控电磁阀,在两端都无电控信号时,阀芯的位置是取决于
4、前一个电控信号。2 传感器部分2.1 传感器简介本机械手设计所使用的传感器都是接近传感器,它利用传感器对所接近的物体具有的敏感特性来识别物体的接近,并输出相应开关信号,因此,接近传感器通常也称为接近开关。2.2 磁性开关磁性开关用来检测气缸活塞位置的,即检测活塞的运动行程的。气缸的活塞上安装一个永久磁铁的磁环,从而提供一个反映气缸活塞位置的磁场。而安装在气缸外侧的磁性开关用舌簧开关作磁场检测元件。当气缸中随活塞移动的磁环靠近开关时,舌簧开关的两根簧片被磁化而相互吸引,触点闭合;当磁环移开开关后,簧片失磁,触点断开。触点闭合或断开即提供了气缸活塞伸出或缩回的位置。磁性开关安装位置的调整方法是松开它的紧定螺栓,让磁性开关顺着气缸滑动,到达指定位置后,再旋紧紧固螺栓。2.3 光电传感器和光纤传感器光电传感器“光电传感器” 是利用光的各种性质,检测物体的有无和表面状态的变化等的传感器。其中输出形式为开关量的传感器为光电式接近开关。漫射式光电开关是利用光照射到被测物体上后反射回来的光线而工作的,由于物体反射的光线为漫射光,故称为漫射式光电接近开关。它的光发射器与光接收器处于同一侧位置。且为一体化
《机械手的设计论文》由会员鲁**分享,可在线阅读,更多相关《机械手的设计论文》请在金锄头文库上搜索。
中班社会领域活动方案案(五篇)
一年级上册语文阅读题、看图写话
保洁主管月工作计划标准样本(6篇).doc
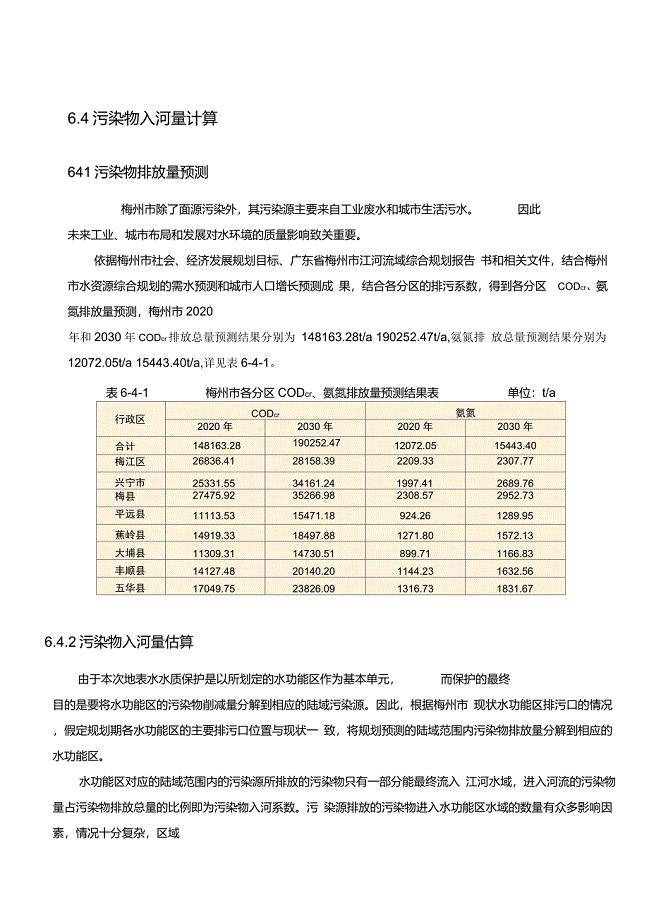
64污染物入河量计算
信用社冒名贷款处置办法
人教版五年级英语上册带音标词汇表(共6页)
关于学习公文写作的心得体会
牛仔布配套纺纱项目商业计划书写作参考
幼儿园科学组教研计划范文(二篇).doc
晋中视频对讲芯片项目建议书
2023年公司行政部工作计划参考范本(2篇).doc
热爱销售-可看
关于催眠知识的介绍
文员试用期个人工作总结标准模板(二篇).doc
大型发电机保护配置
大学旷课学生检讨书模板集锦十篇【word版】
工程质量评估报告样本人防分部主体cpty
高一化学第一章(精品)
毕业单位实习简短自评报告
广告文案写作复习提要
 大学英语B交际用语
大学英语B交际用语
2023-10-01 14页
房地产企业税收筹划
2023-09-11 12页
西北工业大学科技查新工作实施细则(共8页)
2022-08-12 8页
幼儿园优质课教案:奥尔夫音乐欣赏活动:狮王进行曲教学设计与反思
2023-11-17 8页
中考物理专题《电磁学》复习试卷《电与磁》(沪科版九年级)
2023-07-22 4页
自律主题班会
2023-07-03 4页
五下口语交际《走进他们的童年岁月》-教学设计
2023-12-01 5页
土木工程办公楼优秀毕业设计手算和电算结合
2022-10-17 94页
(完整版)高考句式变换试题
2023-06-12 5页
燃气经营许可证换证
2023-07-02 9页