
计算智能技术的MATLAB实现
14页
1、南京航空航天大学研究生课程考试答题纸共页 第1页2013 - - 2014学年第1学期计算智能技术的MATLAB实现课程考试日期:2013年12月28日课程编号:f013036学院学号 姓名 成绩一、综合实验题目和要求本实验主要内容为:增稳系统是在原助力器控制系统上增加飞控计算机、飞 机运动传感器和伺服机构。飞机运动传感器把测量的飞机姿态物理信息(如迎角、 侧滑角、滚转角及其角速率,高度,速度)处理成电信号传给飞控计算机,飞控 计算机按照该型飞机的控制律计算出舵面信息并传给伺服机构控制舵面偏转。本 文旨在基于直接力控制的概念和非线性动态逆的思想并利用遗传算法思想设计 出某联结翼模型飞机纵向姿态增稳控制器。1.1直接升力控制1.1.1直接升力模态单纯的直接升力模态的特点是俯仰角变化量A9和航迹倾角变化量Ay相等,且迎角a保持不变。即A0 =Ay, Aa, A0 =Ay +Aa。这样有迎角产生的升力保 持不变,操纵面组合产生的直接升力提供给航迹倾角变化所需升力的增量。此模 式适用于投弹后的快速拉起,几乎没有时间延迟。1.1.2俯仰轴指向模态俯仰轴指向模态的特点是飞机航迹Ay =0保持不变,
2、只有俯仰角变化量A9和迎角变化量Aa相等。即AO =Aa,Ay =0。此模态垂直平移为0,只有纵向转 动变化。当直接正升力作用于焦点上对重心产生低头力矩,飞机产生负迎角增量, 从而产生负升力增量使之抵消,故作用效果只改变了飞机的俯仰角。俯仰指向 模态就是当飞机高度不变,俯仰角可以在一定的范围内任意选择。此模态中机头 上仰对空战十分有利。1.1.3垂直平移模态垂直平移模态的特点是飞机俯仰角变化量A =0保持不变,即An二0,只有z航迹角变化量Ay和迎角变化量A0相等。即Aa =0, A - A0。此模态正好与俯 仰轴指向模态相反,纵向转动为0,只有平移。此模态在操纵执行后,需要一 定的过渡时间才能达到俯仰角不变,重心沿直线运动的飞行。二、硬件框图在给定仰角及速度的情况下,程序可以自动算出该姿态下对应的系统矩阵A 和控制矩阵B,作为动态逆解耦设计的已知条件。迎角纵向小扰速度动方程系统矩阵A 控制矩阵巳图2.1纵向小扰动结构图图2.2典型飞机俯仰角控制系统结构图三、动态逆解耦思想及Simulink流程图3.1动态逆解耦设计方法简介非线性动态逆的思想就是通过适当的引入非线性输入来抵消一个系统的
3、非线性 部分,并用一个期望的线性模型代替。参考书籍中提到的方法,假如有如下多 变量非线性系统:xp) = f (x)+ g (x )u (t)(3.1)其中x为对象状态变量,f(x)和g(x)是x的非线性函数,u (t)为控制量,通过对u(t)的适当选择,就可以得到模型。令:u (t) = g-i (x ) v - f (x)(3.2)则 X(t) = v (t)(3.3)就是所期望的线性化系统方程。选择v (t )= Kx (t)-x (t)(3.4)代入(4.3),即X (t )= Kx (t)-x (t)(3.5)c表示期望的动态指令。若在跟踪任务中选择v(t)= x (t)+dK x (t )一 x (t)(3.6)其中是期望的终态。把(4.3)代入(4.6)得x (t)一x(t)= K xd(d (t)-x (t)(3.7)此时,系统的性能取决于对角矩阵K的选择,可任意配置系统的闭环极点。如 果K的元素均大于0则能保证(3.5 )或(3.7)所有根均位于左半平面,则(3.3) 能够保证任何跟踪误差都会按指数规律趋于0。从而可知,动态逆方法主要用于消 除系统的非线性因素以及实现
4、多变量系统的解耦控制,因此也可以适用于线性多变 量系统。设线性系统状态方程为(3.8)x (t) = Ax (t) + Bu (t)由纵向小扰动方程知B不是方阵,且BBT不满秩,可将(3.8)进行如下分块整理:x1(t)x 2(t)A A11 12A A21 22x (t)x1 (t)1 0Bu (t)(3.9)其中A为mxm矩阵,A 和A为(n-m)x(n-m)矩阵,且B满秩。11 21 22 2从3.9)可知x (t) = A x (t) + A x (t)1 11 1 12 2(3.10)x (t) = A x (t) + A x (t) + B u(t)2 21 1 22 2 2(3.11)u (t) = B-1 v(t) - A x (t) - A x (t)2 2 21 1 22 2(3.12)x (t) = K x (t) -x (t)222c2(3.13)对于飞控系统控制面有偏转角位置与角速率的限制,仅仅通过对K2的选取, 很难满足要求。K2元素若选得过大,虽然能使系统响应速度加快,但是由于饱 和特性限制,系统输出可能会出现稳态误差而变差,甚至不稳定。因此,对于有 些系
《计算智能技术的MATLAB实现》由会员汽***分享,可在线阅读,更多相关《计算智能技术的MATLAB实现》请在金锄头文库上搜索。
行政办公管理制度设计
如何进行数学活动课的教学
至学年度三年级上学期班主任工作计划
小学老师工作总结范文7篇(小学老师工作总结范文新老师)
鹤壁一体化压铸技术应用项目商业计划书【模板范本】
学会感恩收获别样人生
单位放假通知10篇
美国百年百佳影片——美国电影学院评审
销售部门员工的辞职信
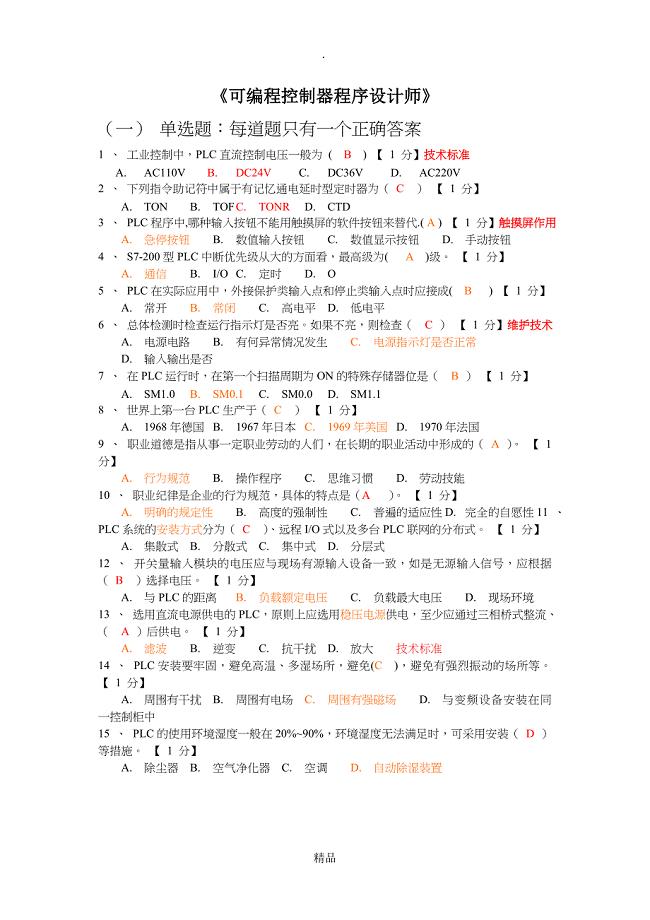
可编程控制器程序设计师
2023年海外市场经理岗位职责13篇
莆田电子元器件研发项目商业计划书
医院手术室护士长2023工作计划范本(四篇)
采矿工程毕业设计-新阳煤矿5Mta新井设计
漏电保护器的工作原理和应用
锅炉事故应急演练方案
一般进出口货物的报关程序论述
2023年06月中共晴隆县委办公室(贵州)招考4名公益性岗位人员笔试题库含答案解析
装修建材的供货合同范本.doc
北京航空航天大学成立于1952年是全国首批985院校北航
 粤港澳大湾区产业发展现状
粤港澳大湾区产业发展现状
2022-09-28 4页
复旦大学上海视觉艺术学院本科生学习成绩表
2023-06-26 4页
细胞中无机盐考试
2023-12-24 9页
2021年党支部书记培训心得
2023-04-05 4页
敬老院关爱空巢老人向老人献爱心实践活动感悟
2023-12-29 7页
提高铁路工务线路维修质量的措施
2022-10-18 4页
浅谈新课改背景下初中化学的有效教学
2023-10-11 4页
美国百年百佳影片——美国电影学院评审
2023-05-19 17页
戏剧翻译中人际意义的跨文化建构
2023-08-25 2页
废品拆除及回收合同
2023-11-05 4页