
多关节机械臂设计与分析研究
55页
1、摘要机器人是自动执行人类工作的移动设备。它不仅能自动接受计算机和人的指令,而且能自动运行预先设计好的工作程序。同时,它还可以根据计算机和人工智能技术的原理和工作程序采取行动。近儿十年来,随着工业机器人制造技术的不断发展,机械臂的技术也趋势成熟,为了使机械臂能更好地与周围环境中的事物进行交互、操作以及完成各项任务,机械臂已广泛应用于了工业生产及其他人们日常生活的各个方面。工业机械臂的技术深入应用研究从最初的使用机器抓取到清理物品到现在的工业汽车装配制造上的汽车装配具有重要的技术指导作用,对其更好的发展和拓宽工业应用和在日常生活服务上的应用具有历史性的重大意义。本论文就关于机器人制造中机械臂的结构设计、建模仿真及动力学分析进行了探讨研究。用ADAMS软件对机械臂进行了动态的仿真,本文分析了机械手在刚体运动过程中对刚体的受力变化,为工业汽车机械手的刚体结构优化设计提供了数据。另外还详细介绍了对机械臂刚体、柔体的模型以及动力学的基础分析。关键词:机械臂仿真模拟动力学模型E】=叫新sin/鸟=叫g(A sin 功 + 方 sin(0 + q2)E3 =?g sin% +4sin(0 +务)+小讽
2、0 +q; + 2 + 鸟=凤豹 sin 0 + m2g(l sin 劣 + 弓 sin( + 务)+%g(k sin 0 + Z2 sin(0 + 务)+4 sin(0 + q2)dE(q)-T=叫耕 COS0 + 吗g(4 cos/ + r2 cos(qi +%)+WL cosq】+12 cos(0 +qD+【3 cos( + 务 +3)dE(q)-r=叫射 cos(劣 + 务)+ m3g(/2 sin(0 + $2)+ 4 sin(名 + / + 务)8E(q)./、-T =COSC0 + 务 + 03)为31.2.3机械系统动力学的仿真在上个世纪,已经就有机械系统动力学仿真的文献。是一种非结构化的编程语言。那时候人机双方数据对换比较麻烦,而且相似度低,经常出错,所以只用于科学研究工业领域,尚未推广形成自己的商品仿真软件。到了七八十年代,出现了大量的机械工程动力学分析和计算仿真软件,如Adina、Markl Sap5等,因此现在一些研究人员已经开始研究并尝试利用现有的通用软件方法在市场上进行操作。机械系统动力学的分析,OHandea和Berenyi仿真软件在最近的文献中,利用了机
3、械系统的动力学计算仿真软件和ADAMS的早期开发版本,对一个六十四自由度的工业分析机器人系统进行了连续加速度和路径动态综合。在20世纪90年代,Z.Yang和J.P.Sadler在他们的文学作品中3和4,采用了有限元分析仿真软件,利用ANSYS的动力学分析和仿真功能,对传统弹性四杆机构和三杆结构进行了仿真。其仿真结果与目前传统的弹性四杆机构动力学仿真分析结果比较相似。但这些解决方案都未必能从根本上有效解决这一问题:用柔性杆FER的软件系统进行建模最终的结果很差,未能得到理想的重要的指标。李论在以上相关文献5中巳经首次地结合ANSYS和柔性杆FER的主要特点和功能,根据不同的实际应用,建立了柔性杆机器人和其他柔性杆机构的动态仿真和设计模型,并给出了大量的计算实例。分析验证了其仿真模型的设计正确性。在下一步中,我们有必须对柔性机构及关节动力学设计进行探讨研究。1.3研究内容本文主要研究和设计了一种轻型柔性串联多关节机械臂,在此基础上,对机械臂的人体运动学和结构进行了研究和仿真,并对机械臂的多关节结构和特点进行了分析。方法如下:本文首先系统地讨论了多关节串联机械臂系统的组成,详细介绍了其结构
4、。接着分析了这种机械臂的流体运动学以及物理计算特性,运用拉格朗日计算方法,推导并提出了关于机械臂的一种刚性流体矢量动力学计算方程,运用了哥氏雅可比矩阵以及哥氏刚体矢量动力学等矩阵的计算方法等并进行了一些相应的物理推导。第二章串联多关节机械臂机构设计2. 1机械臂的机构设计2. 1. 1前言机械臂在工业各领域得到了广泛运用,然而,对它的应用碰到了工程上的一些问题。第一机械臂灵活性问题,大多机械臂都是由于太过笨重,其功能不能很好的体现;第二,机械臂的重量问题,充分考虑到这两点,既要机械臂可以灵活运动,又要尽量减少机械臂重量。所以,采用重量轻的材料,小臂用灵活且重量小的舵机驱动,中臂和大臂受力大,采用力矩大的直流电机驱动,可以有效解决上述问题。2. 1.2结构设计本文提出的机械臂传动结构设计的主要特点和思路之一就是极大地减轻了机械臂与本体的配重,减少了传动结构的复杂性。除了机械臂采用轻质的材料外,还将采用了舵机和驱动电机的小臂进行组合,利用r舵机的灵活,重量轻,以及驱动电机力矩大等的特点将二者很好地结合了起来,通过齿轮直接将电机手臂动力直接传给电机小臂。这样既町以大大提高电机手臂的运动灵活性
《多关节机械臂设计与分析研究》由会员re****.1分享,可在线阅读,更多相关《多关节机械臂设计与分析研究》请在金锄头文库上搜索。
充分利用学校资源强化学生德育工作
国家森林公园生物防火隔离带建设项目可行性研究报告模板-拿地申请立项
白电油安全使用须知
2023年行政部下半年工作计划标准范本(四篇)

初级建构筑消防员中控实操考试考点和答案
2022小学教师学年工作计划
细集料堆积密度作业指导书(干捣)
电子商务网站需求分析文档
(S版)三年级上册教材介绍
学习心得体会 (2)
第7课《辽、西夏与北宋的并立》习题5
食堂托管方案
幼儿园小班教案《暖暖的太阳》教学设计
2011德阳中考历史含答案
中国的律师制度内容
新《施工方案》胜龙大厦施工组织设计方案8
人格心理学 考试重点
高考数学知识点回顾复习
XX石油天然气公司机构编制管理暂行办法
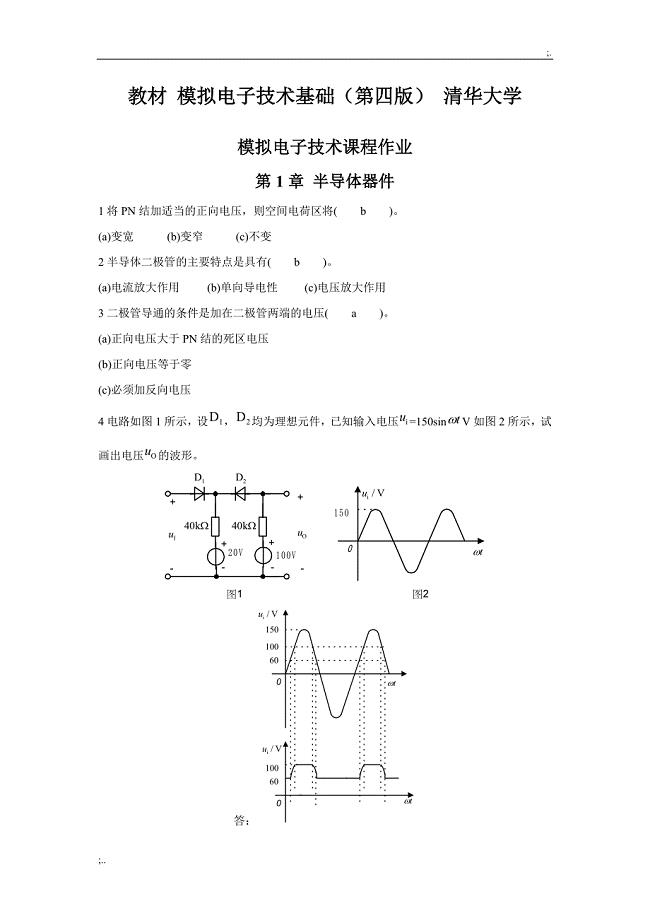
华南理工模拟电子技术平时作业答案
 大自然的画卷作文
大自然的画卷作文
2023-12-08 1页
高考英语一轮复习第一部分教材重点全程攻略Unit3Ahealthylife限时规范特训新人教版
2022-09-14 6页
家长对幼儿学生的评语
2023-09-05 11页
初二生物下学期月考考试试题
2022-08-16 8页
九年级历史上册复习提纲2
2023-10-05 6页
高考数学知识点回顾复习
2023-12-11 6页
如何克服职业倦怠
2024-01-13 10页
吉林省吉林市中考化学复习练习常用气体的发生装置和收集装置与选冉法101无答案新人教版
2023-02-14 6页
2013-2014第二学期七年级语文期中测试题附答案
2022-11-10 8页
化学反应顺序详解
2023-06-09 2页