
毕设工业机器人运动学-文献综述
6页
1、精选优质文档-倾情为你奉上机械臂的运动学分析综述前言随着工业自动化的发展,机械臂在产业自动化方面应用已经相当广泛。机械臂在复杂、枯燥甚至是恶劣环境下,无论是完成效率以及完成精确性都是人类所无法比拟的,也因此,机械臂在人类的生产和生活中发挥着越来越重要的作用。自从第一台产业用机器人发明以来,机械臂的应用也从原本的汽车工业、模具制造、电子制造等相关产业,向农业、医疗、服务业等领域渗透。按照不同的标准,机器人分类方法各异。操作性与移动性是机器人最基本的功能构成1。根据机器人是否具有这两个能力对机器人进行分类,可以把机器人大体分为三大类:(1) 仅具有移动能力的移动机器人。比如Endotics医疗机器人、Big Dog、PackBot,以及美国Pioneer公司的研究型机器人P2-DX、P3-DX、PowerBot等。(2)仅具有操作能力的机械臂。比如Dextre、PUMA560、PowerCube机械臂等。(3)具有移动和操作能力的移动机械臂系统。如RI-MAN、FFR-1、以及勇气号火星车等2。机械臂作为机器人最主要的执行机构,工程人员对它的研究也越来越多。在国内外各种机器人和机械臂的研究
2、成为科研的热点,研究大体是两个方向:其一是机器人的智能化,多传感器、多控制器,先进的控制算法,复杂的机电控制系统;其二是与生产加工相联系,满足相对具体的任务的工业机器人,主要采用性价比高的模块,在满足工作要求的基础上,追求系统的经济、简洁、可靠,大量采用工业控制器,市场化、模块化的元件。机械臂或移动车作为机器人主体部分,同末端执行器、驱动器、传感器、控制器、处理器以及软件共同构成一个完整的机器人系统。一个机械臂的系统可以分为机械、硬件、软件和算法四部分。机械臂的具体设计需要考虑结构设计、驱动系统设计、运动学和动力学的分析和仿真、轨迹规划和路径规划研究等部分。因此设计一个高效精确的机械臂系统,不仅能为生产带来更多的效益,也更易于维护和维修。主题机械臂的运动学分析分为正运动学和逆运动学两部分。正运动学分析是指对于给定的一个机械臂,根据其连杆参数和各个关节变量来求解末端执行器相对于给定坐标系的位置和姿态。逆运动学分析是指根据机械臂已知的连杆参数和末端执行器相对于固定坐标系的位置和姿态,来求解机器人各个关节变量的大小。一、 机械臂正运动学分析可以把任何机器人的机械手看作是一系列由关节连接起来的
3、连杆构成的。我们将为机械手的每一连杆建立一个坐标系,并用齐次变换来描述这些坐标系间的相对位置和姿态。通常把描述一个连杆与下一个连杆间相对关系的齐次变换叫做A矩阵。一个A矩阵就是一个描述连杆坐标系间相对平移和旋转的齐次变换。如果表示第一个连杆对于基系的位置和姿态,表示第二个连杆相对于第一个连杆的位置和姿态,那么第二个连杆在基系中的位置和姿态可由下列矩阵的乘积给出:同理,若表示第三个连杆相对于第二个连杆的位置和姿态,则有:在历史文献上,称这些A矩阵的乘积为T矩阵,其前置上标若为0,则可略去不写。于是对于六连杆机械手,有下列T矩阵: (1.1) 一个六连杆机械手可具有六个自由度,每个连杆含有一个自由度,并能在其运动范围内任意定位与定向。其中,三个自由度用于规定位置,而另外三个自由度用规定姿态。表示机械手的位置和姿态。六自由度链式(6R)机械臂是具有六个关节的空间结构,为描述末端执行器在空间的位置和姿态,可以在每个关节上建立一个坐标系,利用坐标系之间的关系来描述末端执行器的位置。一般采用D-H法来建立坐标系并推导机械臂的运动方程。D-H法(四参数法)是1995年由Denavit和Hartenb
4、erg提出的一种建立相对位姿的矩阵方法。利用齐次变换描述各个连杆相对于固定参考坐标系的空间几何关系。用一个44的齐次变换矩阵描述相邻两连杆的空间关系,从而推导出末端执行器坐标系相对于基坐标系的等价齐次坐标变换矩阵,建立操作臂的运动方程。C.R. Rocha, C.P. Tonetto, A. Dias等人比较了D-H运动学建模方法和基于螺旋理论的运动学建模方法,相比于D-H法建模,螺旋理论法对于整个链需要两个框架,而D-H法只需要一个框架;螺旋理论法坐标系可以随意选取而D-H法不能;螺旋理论法关节变量可能表示绝对位移等。相比于D-H法,螺旋理论法在运动学建模与分析也有一些优势,但没那么流行也没有一套标准化的公式方法3。图1-1表示了三个关节,每个关节都是可以转动或平移的。第一个关节指定为关节n,第二个关节为关节n+1,第三个关节为关节n+2。在这些关节的前后可能还有其他关节。连杆也是如此表示,连杆n位于关节n-1与n+1之间,连杆n+1位于关节n+1与n+2之间。为了用D-H表示法对机器人建模,所要做的第一件事是为每个关节指定一个本地的参考坐标系。因此,对于每个关节,都必须指定一个z轴
《毕设工业机器人运动学-文献综述》由会员桔****分享,可在线阅读,更多相关《毕设工业机器人运动学-文献综述》请在金锄头文库上搜索。
印刷企业五项制度
医药代表二季度工作计划样本(三篇).doc
2023年案场工作计划(精选多篇)
2011年房地产经纪人《制度与政策》习题
有趣的恐龙现代文阅读答案
南开大学21秋《国学概论》在线作业二满分答案37
工程技术资料管理制度范文(10篇).doc
产品质量及售后服务承诺书
“翻转课堂”实施的几个环节
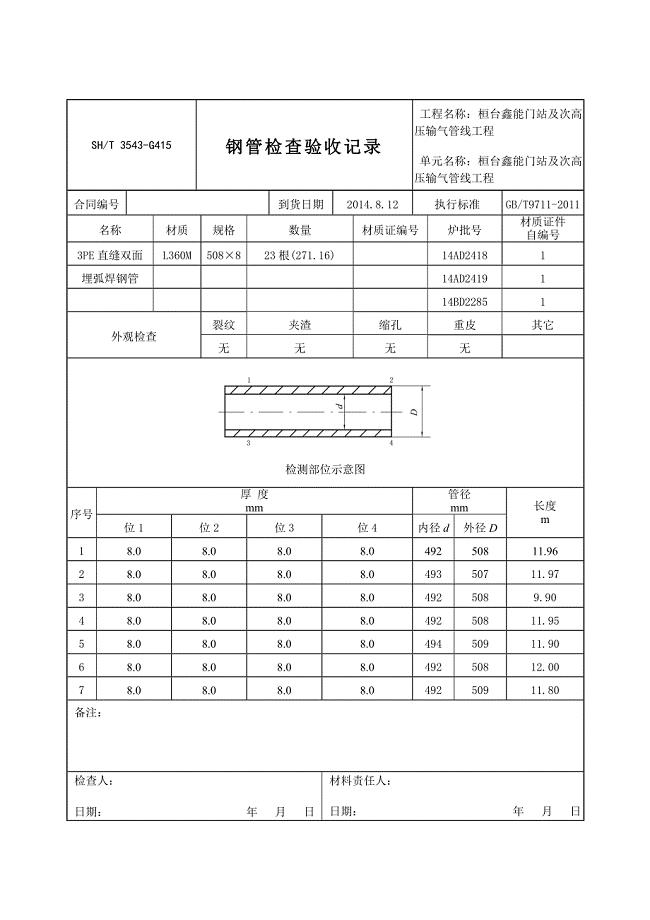
3543-G415钢管检查验收记录
新余关于成立PEEK研发公司可行性报告_参考范文
师德演讲稿锦集5篇
防水工程专项施工方案完成
越秀园工程签证单
学位论文—基于单片机的led点阵广告牌设计课程设计
大宝集团ERP案例分析
小学数学教研活动记录表
2013版工程施工合同示范文本学习与全过程合同管理注意事项
幼儿园园长2023下学期工作计划(二篇).doc
设备报关手续
 2013版工程施工合同示范文本学习与全过程合同管理注意事项
2013版工程施工合同示范文本学习与全过程合同管理注意事项
2024-01-29 12页
公关活动与想法集锦
2022-12-18 7页
院前急救患者与急诊科交接制度
2022-08-13 1页
税收法律制度相关试题
2022-09-01 7页
汽车维修部规章制度牌
2023-06-20 6页
部编版中国历史八年级上册教师教学用书-第1课--鸦片战争(共6页)
2023-09-06 6页
会计实习报告3000字精选
2023-11-26 16页
安全工程概论
2023-11-28 5页
模拟试卷及解析(五)
2022-11-22 25页
石家庄关于成立精密零部件公司可行性研究报告
2023-07-10 130页