
机械设计与制造专业毕业论文中央空调管道清洁机器人的设计
36页
1、摘 要随着经济发展,人们的身心健康越来越受到重视。而污染的中央空调日益成为危及人们身心的祸害根源。因此,中央空调尤其是中央空调管道的检测与清洗越来越受到社会的重视。本文首先阐述了中央空调管道清洗的背景与现状,结合国内外中央空调清洁机器人的发展,阐明了本课题的研究背景和意义,简述了本文的组织形式和研究内容。然后重点介绍了中央空调清洁机器人行走机构、清扫机构和监视控制系统三大结构的设计与实现过程。同时,针对中央空调清洁机器人清扫中央空调管道时存在的难点,本文深入探讨了机器人转弯与安全行走的原理。最后,本文对主要工作和研究内容进行了总结,并对今后的研究方向做出了展望。 关键字: 中央空调,机器人,旋转刷,电动机 / 文档可自由编辑打印目录中央空调管道清洁机器人的设计I摘 要I第一章前 言11.1课题的背景与意义11.2机器人的发展现状及趋势11.2.1国内领先水平的管道清洁机器人21.2.2中央空调管道清洁机器人发展趋势31.3本课题的设计任务3第二章 中央空调管道机器人系统设计52.1工作原理及组成52.2机器人设计原则62.3 整体方案选择7第三章 行走机构设计93.1机器人驱动机构93
2、.1.1电机的选择93.1.2传动齿轮的设计103.1.3传动轴的设计153.2导向轮系统183.2.1导向轮系统原理183.2.2电机的选取183.2.3传动带的选择193.2.4导向轮的设计21第四章 清扫机构- 24 -4.1清扫方案确定- 24 -4.2旋转刷系统主要构件- 25 -4.3构件的选择- 25 -4.3.1气动马达的选择- 25 -4.3.2旋转刷的设计- 27 -第五章 监视控制系统- 28 -5.1摄像头的选择- 28 -5.2摄像头的固定和调整- 28 -5.3监视器- 29 -5.4照明装置- 29 -5.5灰尘收集装置- 30 -第六章 结束语- 31 -参 考 文 献- 33 -谢 辞- 34 -第一章 前 言1.1课题的背景与意义 在室内空气污染来源中,中央空调的污染物与日俱增。2003年8月份中国标准化研究院及卫生部共同起草了GB19210-2003空调通风系统清洗规模和卫生部2003公共场所集中空调通风系统卫生规模,卫生部还于2005年提出了公共场所集中空调通风系统卫生管理办法。目前全国共有上百万台中央空调亟待清洗保养,空调清洗行业正在悄悄兴起。
3、而国内市场上尚无管道清洁机器人产品,本文设计的中央空调管道清洁机器人系统结构简单,自动化程度高,适用范围广,成本较低,对促进我国中央空调管道清洗行业的发展、改善室内空气质量、提高生活和健康水平等具有积极的意义。1.2机器人的发展现状及趋势工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。国外专家预测,机器人产业是继汽车、计算机之后出现的一种新的大型高技术产业。据联合国欧洲经济委员会(UNECE)和国际机器人联合会(IFR)的统计,世界机器人市场前景看好,从20世纪下半叶起,世界机器人产业一直保持着稳步增长的良好势头。进入20世纪90年代,机器人产品发展速度加快,年增长率平均在10左右。2004年增长率达到创记录的20。其中,亚洲机器人增长幅度最为突出,高达43%1.2.1国内领先水平的管道清洁机器人图1-1中央空调管道清洁机器人技术参数规格:380260180mm(长.宽.高)重量:11.5kg工作电压:36v行走速度:800mm/min9800mm/min 无极变速爬坡能
4、力:不小于40度越障碍能力:不小于45mm垃圾铲负重:2kg照明:高亮度LED立体清扫能力:长摆臂水平摆动有效宽度达1250mm,垂直摆动有效高度为1000mm,短摆臂水平摆动有效宽度达800mm,垂直摆动有效高度为800mm特点: 采用双滚刷结构在摆臂与风管侧壁形成夹角时,保证将管道角部彻底清洗干净(采用与管道垂直相切角度旋转毛刷的机构是不可能将角部清洗干净的)。摆臂可以实现水平和垂直摆动分别控制(速度为较适宜的往返10次/每分钟),可同步运动,亦可停在摆臂行程当中的任意位置,以适应矩形风管和圆形风管的不同操作要求,实现真正的立体清扫。 由软轴机提供的强大动力(550瓦)既保证了毛刷大扭矩、高转速的工作要求,毛刷旋转方向亦可随时调整(清扫管道底面时毛刷可将较大的颗粒粉尘抽扫到前方,提高了清洗洁净度)。 摄像机云台置于车体后部,广角镜头可全视角观察到一米处毛刷在最大摆动位置的工作状态(视角1.5米),同时履带行走机构也始终在视线内,方便确定机器人工作位置,清扫过程一览无余。 滚刷尺寸直径较大,厚度较小,只要车体能通过就能进行清洗工作,不会发生毛刷与风管由于尺寸原因卡住的情况,清洗高度在
《机械设计与制造专业毕业论文中央空调管道清洁机器人的设计》由会员re****.1分享,可在线阅读,更多相关《机械设计与制造专业毕业论文中央空调管道清洁机器人的设计》请在金锄头文库上搜索。
内科学记忆口诀小结

美容院管理工具之:员工手册
班主任学期德育工作计划范文
销售员年终工作总结格式范本(4篇).doc
仓库租赁安全协议实标准版(八篇).doc
2023护士长工作计划格式范本(2篇).doc
行政人事处工作总结范文(二篇).doc
2022有关代销合同范文汇编9篇

综合实践课研究性学习教学设计

(新课改省市专用)备战2021高考化学主观题热点押题练(六)(含解析)
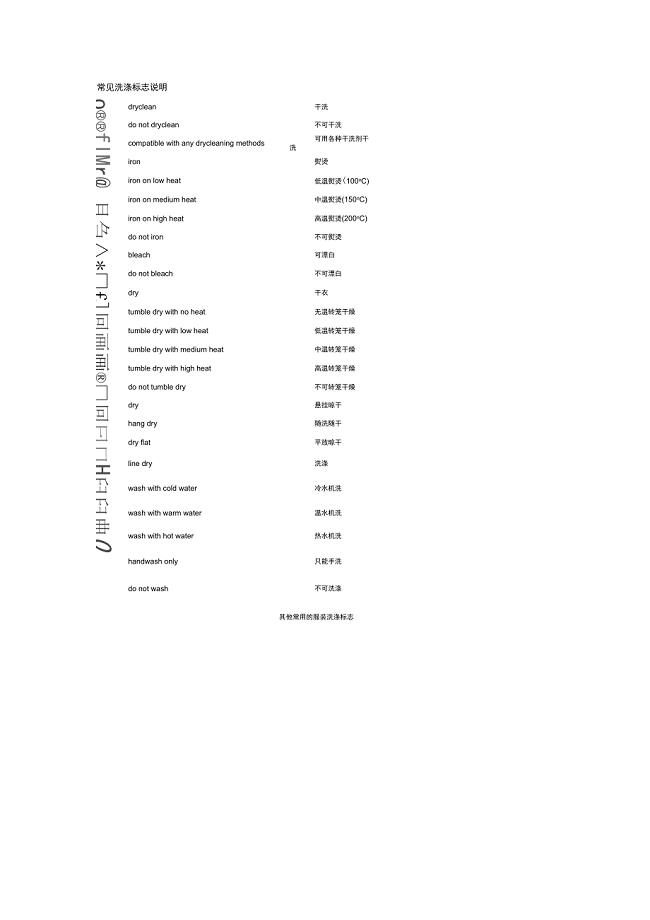
常见洗涤标志说明
临汾新能源电池设计项目招商引资方案
音乐教育学学习心得体会范文
张家界原油油轮服务项目建议书范文参考
青海机器视觉设备研发项目建议书
泰安关于成立LED显示屏公司可行性报告【范文模板】
幼儿园第一学期小班班级安全工作计划模板(五篇).doc
中学教师2022年终工作总结范文
侯闽县实验中学2014学年工作总结
小学五年级语文教案记金华的双龙洞
 浅析合并财务报表中债券投资与应付债券业务的抵销处理
浅析合并财务报表中债券投资与应付债券业务的抵销处理
2022-12-18 6页
XXX公司创新奖励制度.docx
2023-11-02 5页
水质工程学习题库.doc
2022-11-30 11页
浅谈电算化会计中会计分录的编制
2024-01-16 8页
基于虚拟仪器的压力监测系统
2023-07-10 37页
知识型员工的组织认同与忠诚度研究
2023-12-14 8页
大学生喜迎G20峰会活动策划书
2023-09-13 7页
浅谈铁路企业提升人力资源管理科学化的路径分析
2023-05-11 7页
DCS系统在硫酸余热电过程中的应用
2023-04-14 9页
中学课程改革论文浅议新课程环境下教师的专业成长
2024-01-06 4页