
工业机器人技术基础--课后习题集答案
10页
1、 .wd.0.1 简述工业机器人的定义,说明机器人的主要特征。答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种 种任务并具有编程能力的多功能机械手。 1.机器人的动作构造具有类似于人或其他生物体某些器官肢体、感官等的功能。 2.机器人具有通用性,工作种类多样,动作程序灵活易变。 3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。0.2工业机器人与数控机床有什么区别答:1.机器人的运动为开式运动链而数控机床为闭式运动链; 2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。4.机器人灵活性好,数控机床灵活性差。0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪末端执行器的开合自由度。 重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值
2、的偏差来表示。 工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。 工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为 手臂末端最大的合成速度通常在技术参数中加以说明。承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。0.6什么叫冗余自由度机器人答: 从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是01180,-902180,画出该机械手的工作范围画图时可以设L2=3cm。1.1 点矢量v为,相对参考系作如下齐次坐标变换: A=写出变换后点矢量v的表达式,并说明是什么性质的变换,写出旋转算子Rot及平移算子Trans。解:v,=Av=属于复合变换:旋转算子RotZ,30=平移算子Trans11.0,-3.0,9.0=1.2 有一旋转变换,先绕固定坐标系Z0轴转45,再绕其X0轴转30,最后绕其Y0轴转60,试求该齐次坐标变换矩阵。解:齐次坐标变换矩阵R=Rot(Y,60RotX,30Rot(Z,45 = 1.3
3、 坐标系B起初与固定坐标系O相重合,现坐标系B绕ZB旋转30,然后绕旋转后的动坐标系的XB轴旋转45,试写出该坐标系B的起始矩阵表达式和最后矩阵表达式。解:起始矩阵:B=O=最后矩阵:B=Rot(Z,30B RotX,45=1.4 坐标系A及B在固定坐标系O中的矩阵表达式为 A= B=画出它们在O坐标系中的位置和姿势;A=Trans0.0,10.0,-20.0RotX,30OB=Trans(-3.0,-3.0,3.0Rot(X,30RotZ,30O1.5 写出齐次变换阵,它表示坐标系B连续相对固定坐标系A作以下变换:(1) 绕轴旋转90。(2) 绕轴旋转-90。(3) 移动。解:=Trans3,7,9RotX,-90RotZ,90= 1.6 写出齐次变换矩阵,它表示坐标系B连续相对自身运动坐标系B作以下变换:(1) 移动。(2) 绕轴旋转90。.(3) 绕轴转-90。.=Trans3,7,9RotX,90RotZ,90= 1.7 对于1.7图a所示的两个楔形物体,试用两个变换序列分别表示两个楔形物体的变换过程,使最后的状态如题1.7图b)所示。 (a) (b)解:A= B=A=Tran
4、s(2,0,0RotZ,90RotX,90Trans0,-4,0A= =B=RotX,90RotY,90Trans0,-5,0B= =1.8 如题1.8图所示的二自由度平面机械手,关节1为转动关节,关节变量为1;关节2为移动关节, 关节变量为d2。试:(1) 建设关节坐标系,并写出该机械手的运动方程式。(2) 按以下关节变量参数求出手部中心的位置值。 1 0 30 60 90 d2/m 0.50 0.80 1.00 0.70解:建设如以下列图的坐标系参数和关节变量连杆 d 11000200d20机械手的运动方程式:当1=0,d2=0.5时:手部中心位置值当1=30,d2=0.8时手部中心位置值 当1=60,d2=1.0时手部中心位置值当1=90,d2=0.7时手部中心位置值1.11 题1.11图所示为一个二自由度的机械手,两连杆长度均为1m,试建设各杆件坐标系,求出,的变换矩阵。解:建设如以下列图的坐标系参数和关节变量连杆 d 11002100A1=Rot(Z, 1) Trans(1,0,0) Rot(X, 0)=A2= Rot(Z, -2)Trans(l, 0, 0)Rot(X, 9
《工业机器人技术基础--课后习题集答案》由会员cl****1分享,可在线阅读,更多相关《工业机器人技术基础--课后习题集答案》请在金锄头文库上搜索。
安全反思材料经典.doc
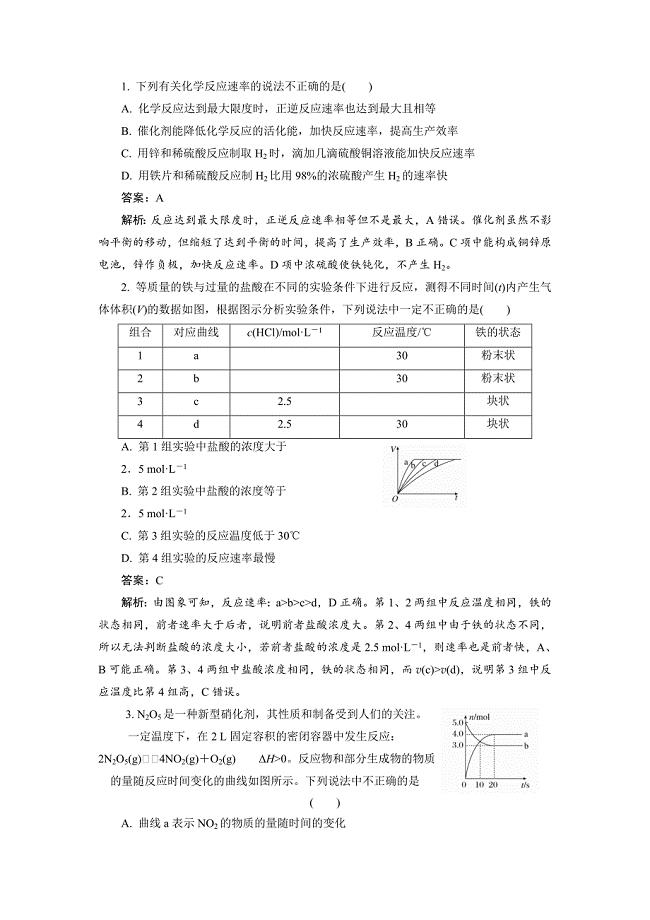
化学反应速率.doc
七年级数学下册_第八章二元一次方程组试题_人教新课标版1.doc
网络通信协议有哪些内容.docx
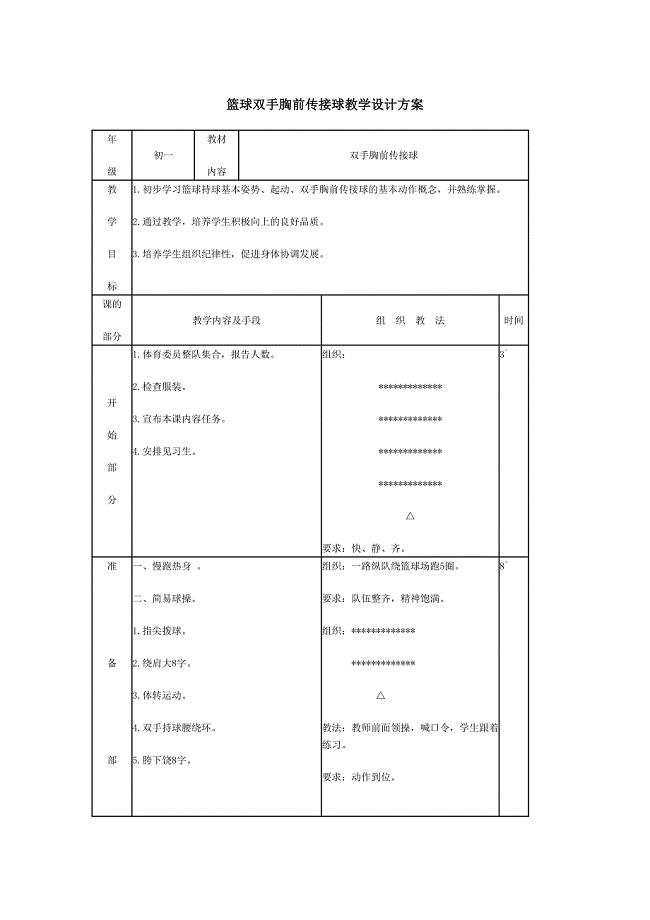
篮球双手胸前传接球教学设计方案
如何提高阅读有效性.doc
南充智能交易终端项目商业计划书(参考范文)
初三化学年度工作方案通用10篇.docx
Unit1Canyouplaytheguitar.docx
2022年教务主任开学致辞范本

6-1用“一一列举”的策略解决实际问题(1)教学案
高一励志的作文满分优秀精选六篇
电脑-维修故障-喷墨打印机-打印头阻塞解.doc
九年级物理周清试题.doc
四点忠告助你写好求职信写作
四年级语文学业测试试卷
县公益性岗位开发管理调研材料
检验科查对制度电子版(四篇).doc
2023年保护环境英语演讲稿Everybody Can Help The Environment.docx
2023年年度最新观看地球上的星星有感心得体会400字(精选5篇)
 在土地卫片执法检查预警约谈会上的表态发言
在土地卫片执法检查预警约谈会上的表态发言
2023-07-09 3页
足球机器人智能决策系统设计实现
2023-12-25 7页
病理学试题库试题卷与答案
2023-12-26 68页
医学和检验医学常用名词英文缩写
2024-01-19 6页
临漳县文化馆评估定级工作总结
2023-06-02 7页
2020年最新防疫物资管理制度
2023-07-04 7页
国有企业管理人员选拔任用管理办法
2023-05-31 6页
ch13机械波习题及答案
2022-12-28 10页
陕西省咸阳市学年高二数学上学期期末考试试题理(扫描版) (1)
2023-10-03 8页
2021年上市公司财务分析报告范文
2023-09-05 7页