
硅基MEMS安全系统参数化仿真方法研究
6页
1、硅基MEMS平安系统参数化仿真方法研究简要:摘 要:针对传统 MEMS 平安系统不具备通用化应用设计的问题。本文基于一体化设计思想,提出了一种硅基 MEMS 平安系统。编写 MATLAB 程序对阈值判定机构可靠解保的临界 g 值进行研究,摘 要:针对传统 MEMS 平安系统不具备通用化应用设计的问题。本文基于一体化设计思想,提出了一种硅基 MEMS 平安系统。编写 MATLAB 程序对阈值判定机构可靠解保的临界 g 值进行研究,并对边界进行分析,得到阈值判定机构连接节点的参数化设计方法。结果说明:当离心加速度超过 52320g 时,阈值判定机构能够可靠的解除保险,且参数化连接节点临界断裂 g 值的理论结果和仿真结果具有较高的吻合度,误差均小于 10%。本文的参数化研究方法可为 MEMS 引信的快速及通用化设计提供一种思路。本文源自畅玉洁; 涂宏茂, 兵器材料科学与工程 发表时间:2022-06-17关键词:MEMS 平安系统;参数化设计;仿真分析MEMS平安系统的应用可以空出足够大的空间使得引信增加新的功能模块 1-5。1998 年 Robinson 等6提出基于 LIGA 工艺,通过
2、环境力解除保险,以美国海军为代表的军方在此方面取得了长足的进展。Robinson 等7-13基于模块化设计思想设计的 MEMS平安系统,可实现局部功能模块的集成加工。 MEMS 平安系统的另一种设计思路那么是机械、电子及火工技术的一体化高密度集成,且可通过特定工艺实现一体化加工14-15。目前,MEMS 平安系统在国内开展迅猛16-18。何光等19-21开展了小口径弹药 MEMS 平安系统的研究。Liu 等22、王辅辅等23、Wang 等24创造了一种垂直弹轴式引信 MEMS 平安系统结构。该平安系统在引信体中垂直于弹轴摆放,具有远解功能。聂伟荣等25、李艳娇26提出一种基于电磁驱动的 MEMS 平安系统。该结构采用垂直于弹轴的摆放方式,以电磁力作为解除保险的动力来源,适用于各口径弹药,特别是导弹等发射过载较低的环境。李志超等27、李艳娇28同样采用垂直于弹轴的摆放方式,整体结构采用环境力保险与电保险结合的设计设计了一种 MEMS 平安系统。从现有文献来看,国外平安系统微小型化技术的两个思路是硅基 MEMS 平安系统与非硅 MEMS 平安系统。其中,DRIE/SOI 加工工艺已成为硅基
3、 MEMS 平安系统主流,可以通过掺杂等工艺与微电子一体化加工,具有集成化程度高等特点。欧美在这一方面,拥有完备的工业体系,并且在 MEMS 加工的工艺、材料的制备工艺以及集成电路工艺方面拥有雄厚的技术积累; LIGA/UV-LIGA 工艺已成为非硅基 MEMS 平安系统主流,取材广泛,本钱低,能实现大的深宽比结构,但是不能一体化加工,需通过微装配完成最终环节。近年来,参数化分析方法在 MEMS 平安系统研究中应用广泛。Wang 等29-30通过参数化分析方法对 MEMS 平安系统的闭锁机构及弹簧进行了研究。 Ostrow II 等31那么对 MEMS 平安系统的电热作动器进行了动力学参数化分析。由此可见,参数化分析方法业已成为 MEMS 平安系统常见的研究手段,开展迅速。作者基于一体化设计理念以及硅的易断裂特性,设计了一种可一体化加工的 MEMS 平安系统,并根据模块化设计思想,建立了考虑弯曲和剪切双模式的“狗骨梁断裂模型,并通过参数化仿真分析方法进行验证,从而实现 MEMS 平安系统的快速、低本钱及通用化设计。1 硅基 MEMS 平安系统的参数化研究图 1 所示为本文提出的 MEM
4、S 平安系统。 MEMS平安系统的整体尺寸为10 mm10 mm0.4 mm,可应用于旋转弹药。弹药在飞行中,受后坐惯性影响,后坐保险机构克服 MEMS 弹簧力迅速滑至底部并被后坐闭锁机构锁死,从而副离心滑块的约束被解除。离心力一旦到达既定的值时,阈值判定机构将断裂破坏,从而释放副离心滑块,滑块随离心力运动,进而与撞击释放机构发生碰撞,使得连接节点碎裂,释放主离心滑块。受离心力作用,主离心滑块和副离心滑块继续运动,最终被闭锁机构限位,此时传爆孔、传爆药柱和电雷管在垂直方向对正,MEMS 平安系统准备就绪,可随时发火。由上文可知,阈值判定机构、后坐保险机构和撞击释放机构是影响 MEMS 平安系统能否可靠完成既定的功能的主要因素。其中,后坐保险机构属于弹簧结构,相关的研究较多,此处不再做过多的论述。而对于“狗骨梁结构:阈值判定机和撞击释放机构,特别是对于硅材料,相关的研究成果相对缺乏。同时,阈值判定机构是否正常解保将直接决定主离心滑块能否完成既定的动作。因此,阈值判定机构作为决定性的功能模块,有必要进行重点研究。对于 MEMS 平安系统来说需要满足以下要求:阈值判定机构,在发生意外跌落时(
《硅基MEMS安全系统参数化仿真方法研究》由会员ni****g分享,可在线阅读,更多相关《硅基MEMS安全系统参数化仿真方法研究》请在金锄头文库上搜索。
三年级上英语说课稿Lesson 23 Happy Birthday冀教版
车间操作工岗位说明书
桥梁全长为630.7m双向6车道三跨预应力混凝土变截面连续梁设计说明书
疼痛科住院医师规范化培训.doc
析国有资本财务管理制度的建设

《职来职往》观后感
培养学生自主探究能力的研究课题总结
经理的竞聘演讲稿汇总十篇
一二三产业融合助推转型发展
记叙文表达方式的讲解

有关培训自我鉴定集合七篇
春节主题活动方案精选版(5篇).doc
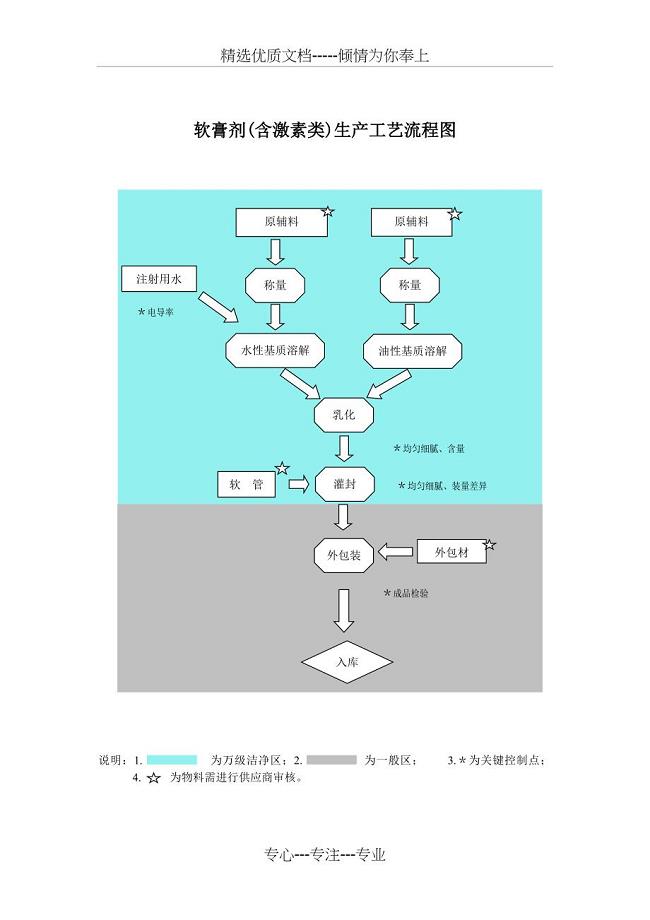
软膏剂、乳膏剂、眼膏剂、眼用凝胶剂、鼻用喷雾剂工艺流程

高速铁路轴承用钢项目商业计划书写作参考
企业个人职业能力提升计划

福建师范大学21秋《世界经济》概论在线作业一答案参考17
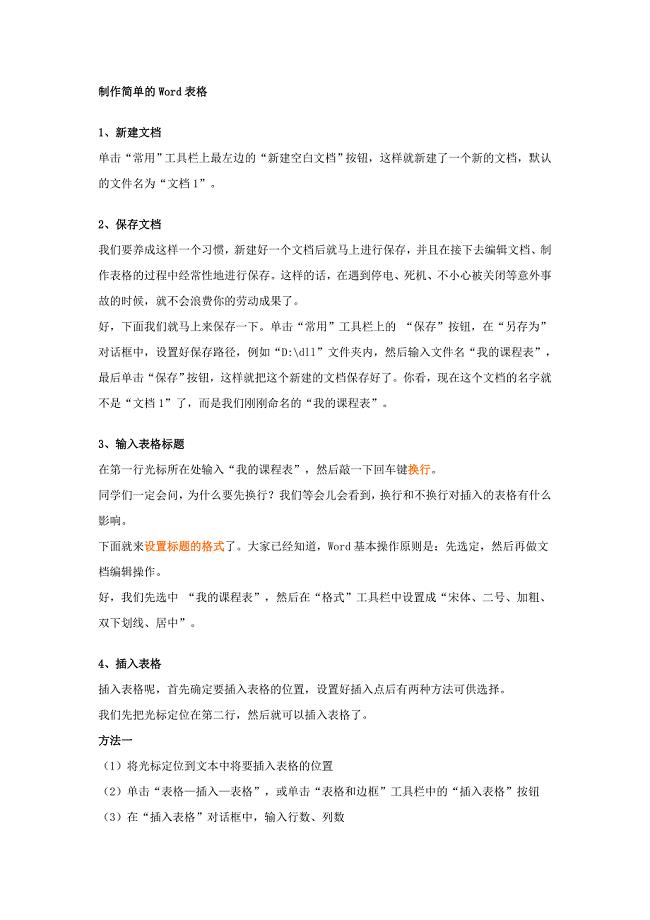
制作简单的Word表格
通信设备检修规程

信息技术应用能力提升培训总结汇报(3篇).doc
大学生代班主任工作总结
 简易版个人房屋买卖协议书
简易版个人房屋买卖协议书
2024-02-29 4页
师生互动策略在初中英语课堂中的应用
2023-03-03 5页
浅谈如何做好工程造价方面的协审工作.docx
2023-07-20 4页
二手车购车合同范本(精简版)
2023-04-01 2页
论文中文版使用基于微控制器的气象数据采集系统监测温室的温度
2022-10-04 11页
银行优质服务之我见
2023-09-15 3页
护理论文的创新性探讨
2023-07-08 5页
初三历史老师家长会发言稿
2023-12-27 6页
天然气管道安全施工协议书.doc
2023-05-03 9页
代理招聘方案
2023-12-10 4页