
PID控制原理以及形象解释
4页
1、PID控制原理以及形象解释01-02 10:28:52分类: 默认分类 标签: |字号大中小订阅 I控制原理首先,PD应用范围广。虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了. 其次,PID参数较易整定。也就是,ID参数K,Ki和可以根据过程的动态特性及时整定.如果过程的动态特性变化,例如可能由负载的变化引起系统动态特性变化,PI参数就可以重新整定。比例積分微分控制包含比例、積分、微分三部分,實際中也有I和PD控制器。PID控制器就是根據系統的誤差利用比例積分微分計算出控制量,控制器輸出和控制器輸入(誤差)之間的關係在時域中可用公式表示如下比例(P)控制 比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差訊號成比例關係。當僅有比例控制時系統輸出存在穩態誤差(Stea-state er)。 積分(I)控制在積分控制中,控制器的輸出與輸入誤差訊號的積分成正比關係。 對一個自動控制系統,如果在進入穩態後存在穩態誤差,則稱這個控制系統是有穩態誤差的或簡稱有差系統(ysem withSeay-ate Erro)。為了消除
2、穩態誤差,在控制器中必須引入“積分項”。積分項對誤差取關於時間的積分,隨著時間的增加,積分項會增大。這樣,即便誤差很小,積分項也會隨著時間的增加而加大,它推動控制器的輸出增大使穩態誤差進一步減小,直到等於零. 因此,比例+積分(PI)控制器,可以使系統在進入穩態後無穩態誤差. 微分(D)控制 在微分控制中,控制器的輸出與輸入誤差訊號的微分(即誤差的變化率)成正比關係。 自動控制系統在克服誤差的調節過程中可能會出現振蕩甚至失穩。其原因是由於存在有較大慣性的元件(環節)和(或)有滯後(delay)的元件,使力圖克服誤差的作用,其變化總是落後於誤差的變化。解決的辦法是使克服誤差的作用的變化要有些“超前”,即在誤差接近零時,克服誤差的作用就應該是零.這就是說,在控制器中僅引入“比例”項往往是不夠的,比例項的作用僅是放大誤差的幅值,而目前需要增加的是“微分項”,它能預測誤差變化的趨勢,這樣,具有比例微分的控制器,就能夠提前使克服誤差的控制作用等於零,甚至為負值,從而避免了被控量的嚴重地沖過頭. 所以對有較大慣性和(或)滯後的被控對象,比例微分(PD)的控制器能改善系統在調節過程中的動態特性。 当
3、今的自动控制技术都是基于反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。 这个理论和应用自动控制的关键是,做出正确的测量和比较后,如何才能更好地纠正系统. PID(比例积分-微分)控制器作为最早实用化的控制器已有5多年历史,现在仍然是应用最广泛的工业控制器。PD控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器. PID控制器由比例单元(P)、积分单元(I)和微分单元()组成. 比例(P)调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定. 积分(I)调节作用:是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数T,T越小,积分作用就越强.反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成调节器或PID调节器。
《PID控制原理以及形象解释》由会员ni****g分享,可在线阅读,更多相关《PID控制原理以及形象解释》请在金锄头文库上搜索。
最新动词被动语态培优题(word)1.doc
2023年环保局环境保护三年行动计划.docx

《管理心理学》课后复习题及答案-.docx

我的育人小故事.doc

最新版学校工作总结.doc
车主如何DIY汽车玻璃清洗剂.doc
2012湖南高考作文题及满分作文和优秀作文
班主任学习参考
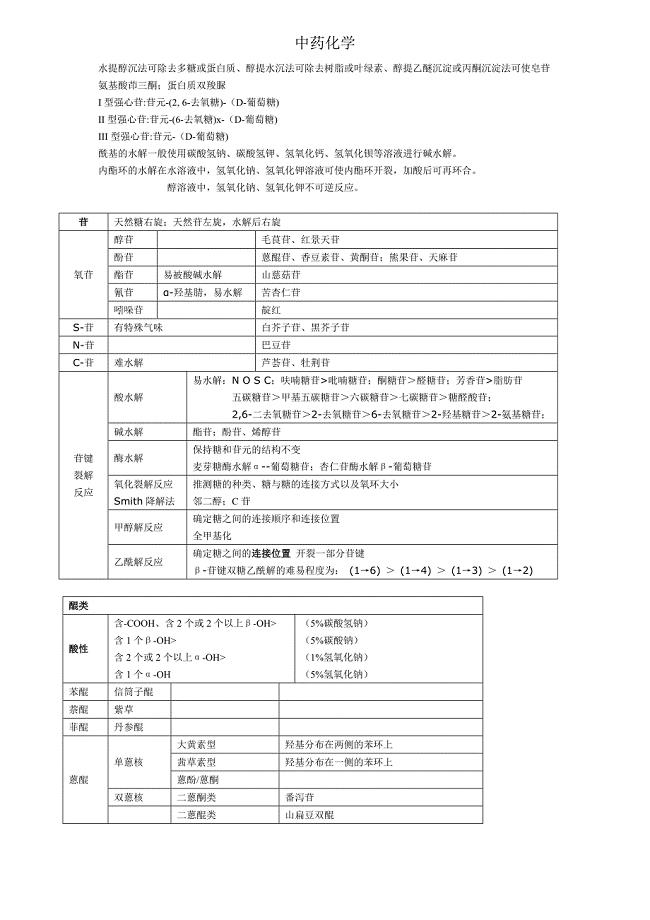
(完整版)主管中药师中药化学总结.doc

冀教版六年级上期品德与社会期末复习题及答案
过期食品能不能吃.doc
可达灵片项目建议书写作模板-立项前期
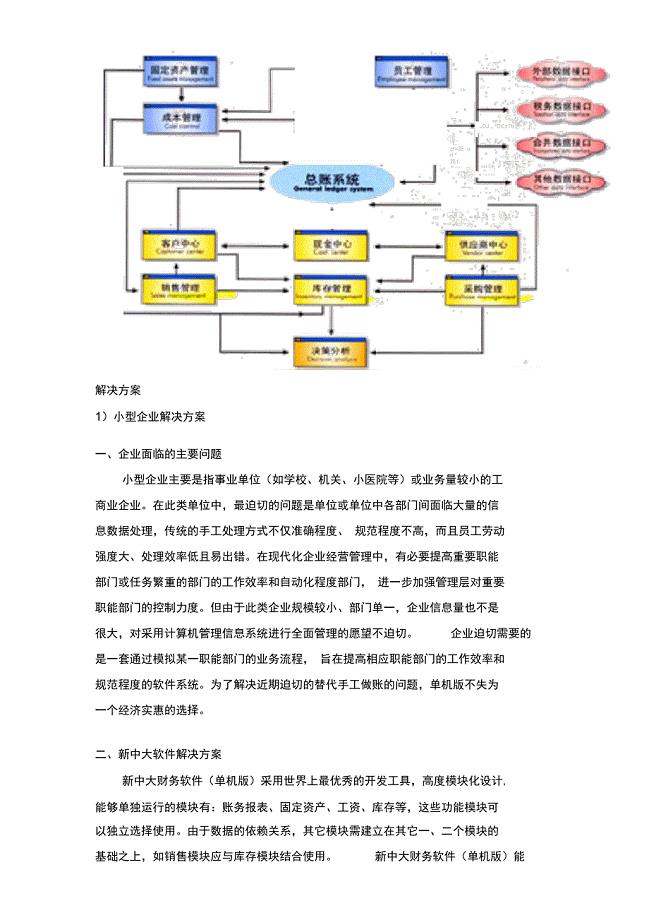
新中大解决方案

2023年师德培训体会心得体会模板7篇
C语言链表员工信息管理系统实验报告册
冀教版四年级科学上册期中试卷【含答案】.doc

2023年桂林山水之教材分析教学反思.doc
![二年级语文下册《咏柳》教案部编[46].docx](https://union.152files.goldhoe.com/2024-2/7/c328da57-ca03-46f1-99bf-0296841890e8/pic1.jpg)
二年级语文下册《咏柳》教案部编[46].docx

福建师范大学21春《软件工程》在线作业三满分答案46
财产抵押借款反担保协议范本(2篇).doc
 《市场营销学》第10章在线测试33514
《市场营销学》第10章在线测试33514
2022-07-29 4页
高中化学新课程有效教学模式的探究和实践
2022-08-26 2页
签约仪式致辞格式范文500字
2022-08-22 5页
最新硕士论文致谢方法
2022-09-07 1页
深井潜水泵简介及型号规格表【图表记录】
2023-12-09 7页
《女娲补天》教学建议
2023-04-19 2页
销售求职信4篇
2023-09-13 7页
工地试验室建设
2023-03-10 18页
二年级上册音乐教案云 1|人音版(简谱)(2018秋)
2023-10-13 2页
给教师的一百条建议读书笔记
2022-09-19 47页