
单闭环pwm直流调速系统分析及校正
8页
1、-2011年专业课程综合设计课题任务书单闭环V-M/PWM-M直流调速系统分析及校正一、课题已知条件:如图,在直流电动机轴上安装一台测速发电机TG,从而引出与被控量转速成正比的负反馈电压Uf,与给定电压Ug相比较后,得到偏差电压U,经过放大器A,产生触发装置GT的控制电压UC,用以控制电动机转速。第*组:PWM-M系统设计电动机D:PN=10kW,UN=220V,IN=Id=50A, nN=1000r/min,Ra=0.5, Ce=0.192Vmin/r,GD2=10Nm2,L=20Mh,Ts=1.67ms,Cm=30/ 放大器:KP=* 晶闸管触发整流装置GT:放大倍数Ks=* 电阻Rz=* 测速发电机TG:Prd=23.1kW,Urd=110V,Ird=0.21A, nrd=1900r/min 生产机械要求调速*围D=*,静差率s=*%二、课题设计要求(大纲):1)单闭环调速系统的基本分析(1)说明机械负载对调速系统的基本要求(调速、稳速、加减速控制)(2)调速系统的主要静态和动态参数指标(3)单闭环直流调速系统的组成及功能2)系统的稳态分析(1)建立系统的稳态数学模型:推导出系统
2、的传递函数或频率特性(2)闭环调速系统的性能分析:满足误差要求选择放大器的放大倍数3)单闭环调速系统的动态分析与校正(1)建立该系统的动态数学模型:画出动态结构图(2)单闭环调速系统的稳定性分析:劳斯判据判断,K值取值*围(3)说明稳定条件与稳态精度要求的矛盾 4)系统的动态校正-PI调节器设计(1)利用开环频率特性进行校正:在对数坐标纸上画图,使系统满足性能指标要求(2)PI调节器设计计算并选型三、参考书目:1、 机械工程控制基础,曾孟雄,*屹主编2、 运动控制系统,阮毅主编3、 机电传动控制,邓星钟主编四、 成果形式:1、 课程设计说明书1份(标准封面,课程设计专用稿纸,手写体,5000字以上)。控制系统图简析:根据自动控制原理,反馈控制的闭环系统是按被调量的偏差进行控制的系统,只要被挑梁出现偏差,它就会自动产生纠正偏差的作用。转速降落正是由负载引起的装束偏差,显然,闭环调速系统应该能够大大减少转速降落。一单闭环调速系统的基本分析:(1) 机械负载对调速系统的基本要求(调速、稳速、加减速控制) 任何一台需要控制转速的设备,其生产工艺对消速性能都有一定的要求。例如,最高转速与最低转速
3、之间的*围,是有级调速还是无级调速,在稳态运行时允许转速波动的大小,从正转运行变到反转运行的时间间隔,突加或突减负载使得允许的转速波动,运行停止时要求的定位精度等等。归纳起来,对于调速系统转速控制的要求有以下三个方面:1、调速。在一定的最高转速和最低转速*围内,分档(有级)地或者平滑(无级)地调节转速。2、稳速。以一定的精度在所需转速上稳定地运行,不因各种可能的外来干扰(如负载变化、电网电压波动等)而产生过大的转速波动,以确保产品质量。3、加、减速控制。对频繁起、制动的设备要求尽快地加、减速,缩短起、制动时间,以提高生产率;对不宜经受剧烈速度变化的生产机械,则要求起、制动尽量平稳。(2)调速系统的主要静态和动态参数指标 1. 稳态指标:运动控制系统稳定运行时的性能指标称为稳态指标,又称静态指标。(1)调速*围D 生产机械要求电动机能达到的额定负载时最高转速nma*和最低转速nmin之比称为调速*围,用字母D表示。(2)静差率S 当系统在*一转速下运行时,负载由理想空载变到额定负载时所对应的转速降落与理想空载转速no之比,称为静差率S。 另外还有 位置随动系统的定位精度、速度跟踪精度、*
4、力控制系统的稳态*力误差等。 2. 动态指标:运动控制系统在过渡过程中的性能指标称为动态指标。(1)跟随性能指标图8.5 表示跟随性能指标的单位阶跃响应曲线上升时间tr单位阶跃响应曲线从零起第一次上升到稳态值所需的时间称为上升时间,它表示动态响应的快速性。超调量动态过程中,输出量超过输出稳态值的最大偏差与稳态值之比,用百分数表示,叫做超调量。调节时间ts 调节时间又称过渡过程时间,它衡量系统整个动态响应过程的快慢。实际应用中,一般将单位阶跃响应曲线衰减到与稳态值的误差进入并且不再超出允许误差带(通常取稳态值的5%或2%)所需的最小时间定义为调节时间。(2)抗扰性能指标 控制系统在稳态运行中,如果受到外部扰动(如负载变化、电网电压波动),就会引起输出量的变化。输出量变化多少?经过多长时间能恢复稳定运行?这些问题反映了系统抵抗扰动的能力。抗扰性能指标有以下几项: 最大动态变化量 系统稳定运行时,突加一定数值的扰动后所引起的输出量的最大变化,用原稳态值输出C1的百分数表示,叫做最大动态变化量。输出量在经历动态变化后逐渐恢复,达到新的稳态值,C2(C1C2)是系统在该扰动作用下的稳态误差(即静
《单闭环pwm直流调速系统分析及校正》由会员M****1分享,可在线阅读,更多相关《单闭环pwm直流调速系统分析及校正》请在金锄头文库上搜索。

2023幼儿园春季传染病防控工作计划标准范本(三篇).doc

人教版初二物理第34讲:机械效率综合(教师版).docx
2023年磁生电.doc

2023年上半年创城工作开展情况报告.docx
2023年X水务局党建工作汇报总结.doc
单片机实训教学改革方法研究与实践基地的建设-最新教育文档
车辆维修合同书.doc

机械制造工艺学复习题2
幼儿园小班寒假工作计划标准范本(6篇).doc
广东省广州市第一一三中学2022-2023学年物理高一上期中统考模拟试题(含解析).doc
2023年市长在全市路网建设动员大会上的致辞.docx
2023年司法局扫黑除恶半年工作总结.docx

瓦楞纸箱说明书
2023年乡镇双拥工作计划4.docx

初创型企业股权激励计划.docx

Photoshop纹理制作之布料裘皮

2023年新进教师会议发言稿.doc
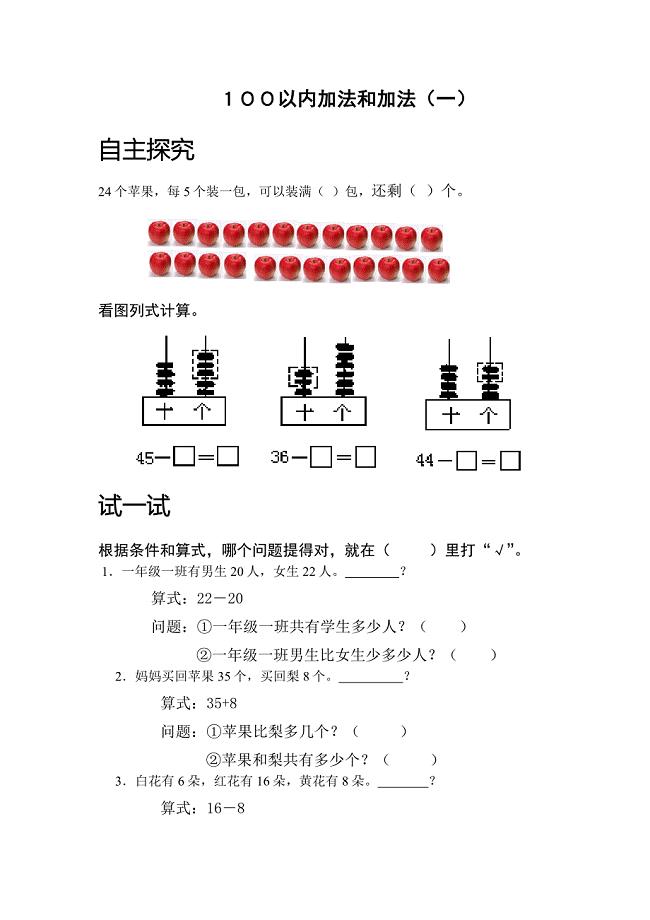
100以内的加法和减法(一).doc
速铁路软土地基处理技术.doc

财务年度工作计划集锦9篇.doc
 垂直平分线(教学设计)1120
垂直平分线(教学设计)1120
2022-08-29 5页
物体的浮沉条件练习题(含答案)(DOC 8页)
2023-04-09 9页
完整版新视野大学英语视听说教程第四册答案
2023-11-07 172页
(广西地区)中考化学总复习第一篇考点聚焦第14讲溶液的形成溶解度检测
2023-12-28 4页
信息技术-王礼伦单元知识结构分析
2023-01-06 3页
基于fnn的故障诊断报警系统大学论文
2022-12-01 73页
污水处理(生物)操作规程范本
2023-06-03 19页
小流域施工设计方案
2023-09-16 80页
宏观经济学分题
2023-08-01 18页
农技推广上半年工作总结
2022-09-26 7页