
层析反演静校正手册第一期
15页
1、第 1 期回折波层析反演静校正方法绿山地球物理公司北京代表处使用手册北京市海淀区中关村南大街 1号友谊宾馆苏园61132-33室 邮编 100873电话 (10) 6845.8445 传真 (10) 6849.8375Email : 方法介绍Fathom Tomography(FathTomo)回折波层析反演方法是绿山公司最新开发的静校正应用模块,是对现有绿山静校正软件包的补充和扩展。与现有的延迟时方法相比,层析方法提供了一种不同于折射模型的静校正计算方法。Fathom将折射信息分解到炮点和检波点的延迟时间和折射层的速度,而FathTomo方法则不同。差别重要在于对地球物理和地学观点的基本模型假设不同,层析将地球看作更复杂的模型。层析方法可以在延迟时方法应用困难的地区得到更好的近地表模型和静校正量。Fathom方法针对近地表模型进行逐步的分析和解释。软件包中的每一个模块都起到决定作用。FathTomo不规定用户对算法的细节和地球物理关系有具体的了解,只要有了初始模型和初至时间,即能求解得到最终模型。整个过程不需要进行人为干预,同时,用户需要输入或控制的参数较少。使用建议Fathom T
2、omography可以对任何观测系统求解模型和计算静校正量。但是,对下列观测系统类型,我们建议在GeoScribe II模块中为观测系统提供附加的测量信息,这样才干求得更好的静校正值。当Fathom Tomography模块打开数据库后,这些附加的信息将自动参与计算。炮点为地面炸药激发的观测系统。在G2中,用户需提供True Z Coordinate of the Shot Point Location和True Z Coordinate of the Receiver Point Location。炮点在井下炸药激发的观测系统。在G2中,用户需要提供True Z Coordinate of the Shot Point Location、True Z Coordinate of the Receiver Point Location、Uphole Time、Shot Depth - Depth of the “Down Hole” Explosive。(OBDC)海底电缆观测系统,在近水面激发。用户需提供Z Coordinate Value of “0” for the Shot P
3、oint Location、Shot Depth - Depth below the Water Surface for Source、Water Depth at each Shot Point Location、Z Coordinate at Water Bottom for each Receiver Location。海上拖缆、近水面激发观测系统。在G2中,用户需提供Z Coordinate value of “0” for the Shot Point Location、Z Coordinate value of “0” for the Receiver Point Location、Water Depth at each Shot/Receiver Point Location、Shot Depth(Depth below the Water Surface) for the Source、Receiver Depth(Depth below the Water Surface) for the Receiver。回折波层析反演原理FathTomo是一个全三维回折波层析反演
4、方法,通过建立近地表速度模型,计算静校正量,合用于二维和三维资料。该方法是一个速度反演过程。对任何观测系统,用回折波或连续折射直达波,交互反演近地表的速度变化。层析速度算法涉及多个环节:(a)初至时间拾取;(b)模型离散化和初始速度;(c)射线追踪和分割;(d)剩余时间(误差)计算;(e)速度更新,减小误差。简朴流程如下:初始模型射线追踪层 析计算剩余时间输出模型初至时间层析运算涉及一个正演过程即计算每个炮检对的旅行时间,和一个反演过程即速度得到交互更新,生成速度模型。通过若干次迭代(每次迭代都是一个射线追踪、剩余时间计算和速度更新的周期)得到一个平滑的速度模型。一般来讲,根据不同的初始模型和不同噪音水平的初至时间,通过8-10次迭代后,误差都可以得到收敛。层析反演流程和参数(一)大炮初至拾取层析反演方法需要炮点和检波点的坐标信息和大炮初至时间。用GeoScribe II模块建立观测系统数据库,用Picker模块拾取地震道的初至时间,或者从其他解决系统输入拾取的初至时间。拾取的初至时间代表观测到的通过模型的旅行时间,用于计算剩余(误差)时间。(二)模型空间离散化和初始速度模型定义模型空
《层析反演静校正手册第一期》由会员大米分享,可在线阅读,更多相关《层析反演静校正手册第一期》请在金锄头文库上搜索。
空调安装施工方案
初中音乐《春江花月夜》教案3
携带管制刀具的危害
小学五年级数学上册第一单元课时练习题
婚前财产协议标准模板(四篇).doc
年产30万吨化肥项目资金申请报告写作模板
推荐-《战略管理》课后思考题
2022年年度公共机构节能工作总结范文
XXXX钢铁冶金行业风险研究报告(0720)
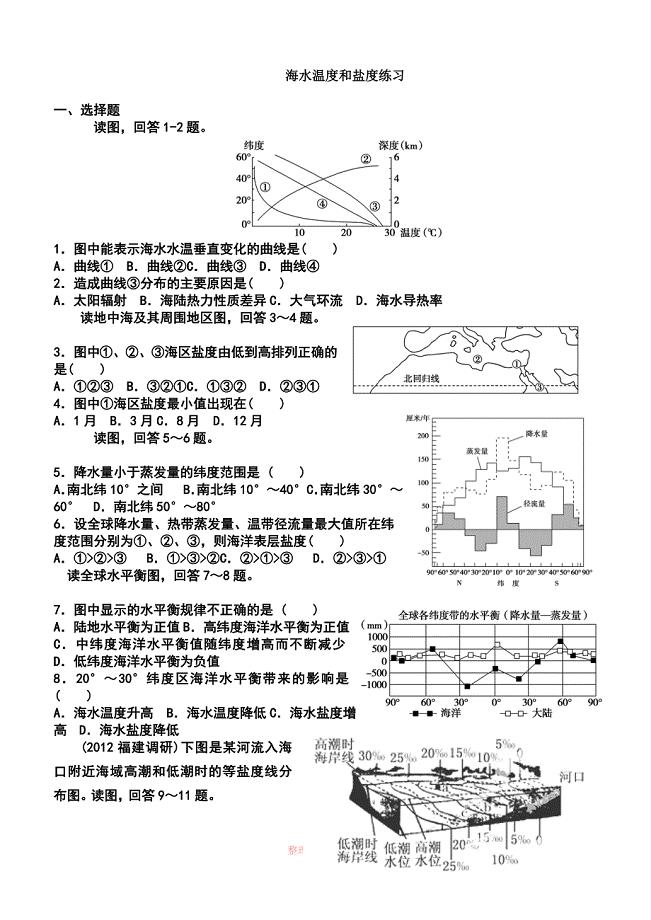
海水温度和盐度练习
2022年考博英语-四川农业大学考前拔高综合测试题(含答案带详解)第170期
通过游戏促进幼儿创新能力的发展
机械火灾应急救援演练方案1
工厂采购人员试用期转正总结(九篇).doc
以生为本以读为主
《爸爸的花儿落了》读书笔记
以礼物为话题的作文
精品资料2022年收藏的财务预测利用线性回归分析法预测资金需求量
最新三立国际学校:2022优质课活动方案
《白说》读后感
 《窗边的小豆豆》亲子读书笔记
《窗边的小豆豆》亲子读书笔记
2022-09-02 4页
2021年公司干事辞职报告
2022-09-13 1页
企业2017年度安全工作计划
2023-08-17 3页
2023年店面转让合同协议书范本
2023-01-23 12页
八版药理学归纳
2023-06-29 41页
竞选纪律委员发言稿
2023-01-16 18页
修改基坑降水施工方案设计2
2023-02-14 14页
零件加工合同模板
2023-08-24 2页
油电混合动力汽车行星齿轮箱设计
2024-02-04 43页
国庆节演讲稿13篇演讲稿,国庆节
2022-09-03 17页