
毕业设计(论文)-ROBOCON比赛机器人设计
66页
1、毕业设计(论文)中文摘要本课题的目的是针对2008亚太机器人大赛的主题和规则设计制作一台手动机器人。本文首先分析了本届比赛的特点,阐述了比赛的总体方案,提出了手动机器人的任务目标和主要技术参数。在此基础上,设计了三套整体结构方案,并通过三维实体建模和样机实验等方式分析了各方案的优缺点,完成了对整体结构方案的优化与改进,确定了手动机器人的机构组成。之后,对机器人的各组成机构进行了详细设计,完成了走行方式、提升机构形式和夹持机构形式的设计与改进,进行了电机选型计算和关键零件的校核,绘制了机器人的零件图和装配图,解决了在机器人的组装和调试过程中发现的一些问题。 设计并制作完成的手动机器人结构简洁,动作迅速,操控灵活,性能稳定,得分效率高,完全满足设计要求。关键词: 亚太机器人大赛,手动机器人,方案设计,机构设计AbstractThe purpose of this subject is to design a manual robot for the Asian-Pacific Robot Contest 2008. After analyzing the characteristics o
2、f this contest, the paper firstly elaborates the general strategy, and then proposes the tasks and main requirements for the manual robot. Based on that, three structural schemes of the robot are designed, and then optimizations and improvements are accomplished through analyzing of the 3D models and robot prototypes. So the mechanisms which composed the manual robot are determined. After that, details of the mechanisms are designed; improvements are made for the moving style, the elevating and
3、clamping mechanisms which are selected. Motors are selected according to computation, key parts are checked, and drawing of parts and assemblage are given. Some problems are solved through debugging.The manual robots structure is very simple, and it moves fast, scores efficiently. Further more, it is very convenient to control the robot. In a word, it satisfies the requirements of design. Key words: Asian-Pacific Robot Contest, Manual robot, Scheme design, Mechanical design目 录中文摘要IAbstractII第1章
4、绪论11.1机器人及机器人竞赛11.2 ABU-Robocon概述21.3 ABU-Robocon2008主题与规则摘要31.4 章节概述6第2章 规则分析以及参赛总体方案82.1 规则分析82.2 参赛总体方案的确定112.3 手动机器人的功能要求和主要技术参数13第3章 整体结构方案设计与改进153.1 方案一173.1.1 设计思路173.1.2 动作顺序193.1.3分析与总结203.2 方案二213.2.1 设计思路213.2.2 动作顺序233.2.3 分析与总结233.3 方案三243.3.1 设计思路与总体结构243.3.2 优化与改进25第4章 机械系统设计324.1 走行系统设计324.1.1 走行方式选择324.1.2 走行电机选择344.1.3 走行系统结构形式及外形尺寸404.2 提升机构设计414.2.1 优化与改进424.2.2 相关计算与校核484.3 夹持机构设计52第5章 操作手柄设计545.1 操作方式和按键布局设计545.2 摇杆模拟量的采集、编码与发送55总结58致谢60参考文献61附录一:中文翻译.64附录二:外文原文.83-IV-毕业设计(
《毕业设计(论文)-ROBOCON比赛机器人设计》由会员M****1分享,可在线阅读,更多相关《毕业设计(论文)-ROBOCON比赛机器人设计》请在金锄头文库上搜索。
孕妇注意知识3.doc
峨眉山实习报告
2023年水利局竞选业务股股长的演讲稿5篇.docx
酒店室内装饰工程安全事故应急预案.doc
财务总监月度工作计划整理酒店财务总监个人工作计划
2023年强化医疗质量管理确保医疗安全.docx
高效课堂之我见.doc
2023年市发改委成员赴天津石家庄进行考察学习考察报告.docx
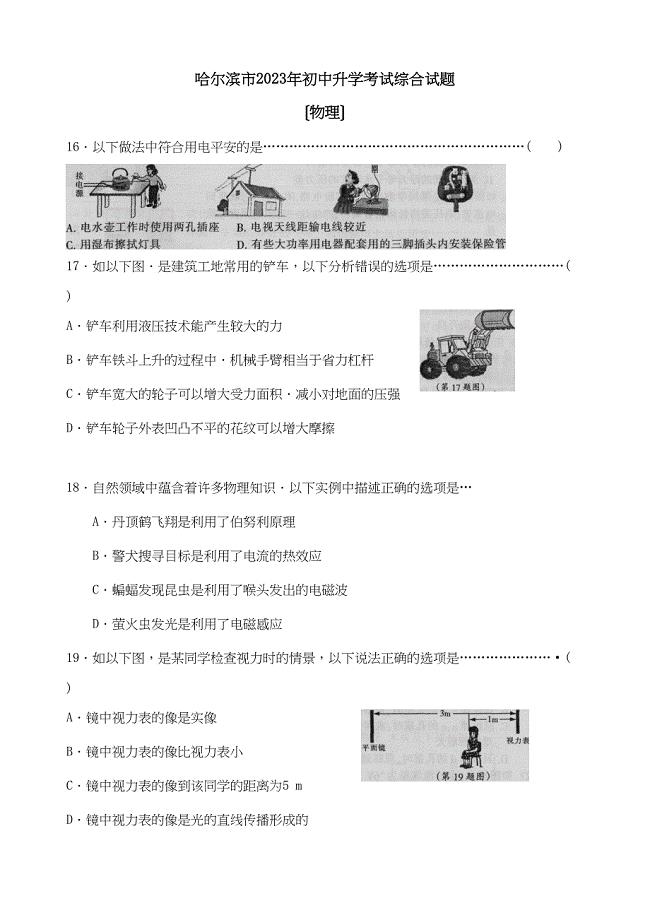
2023年黑龙江哈尔滨市初中升学考试综合试题初中物理.docx
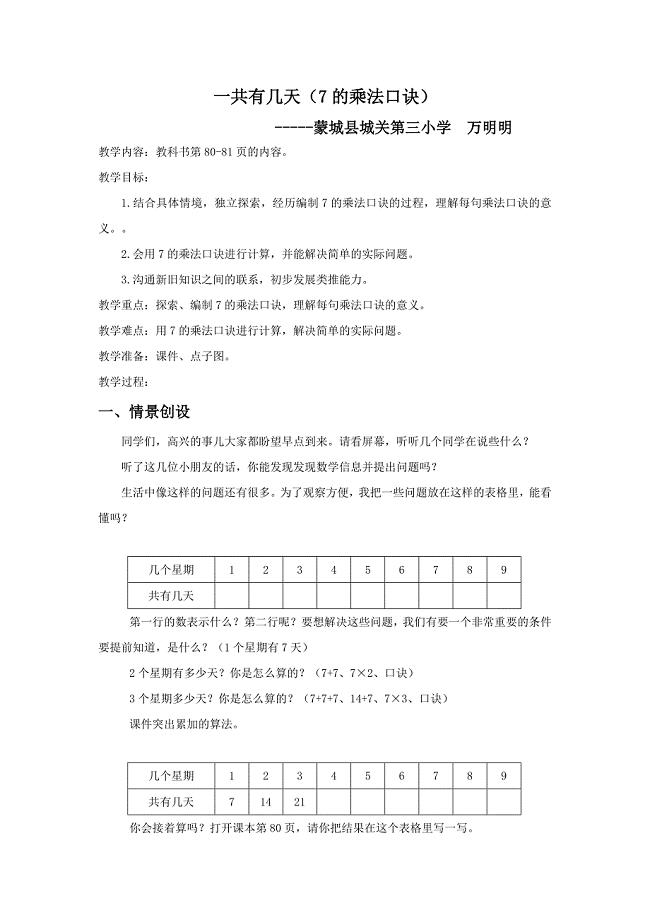
一共有几天 (2).doc
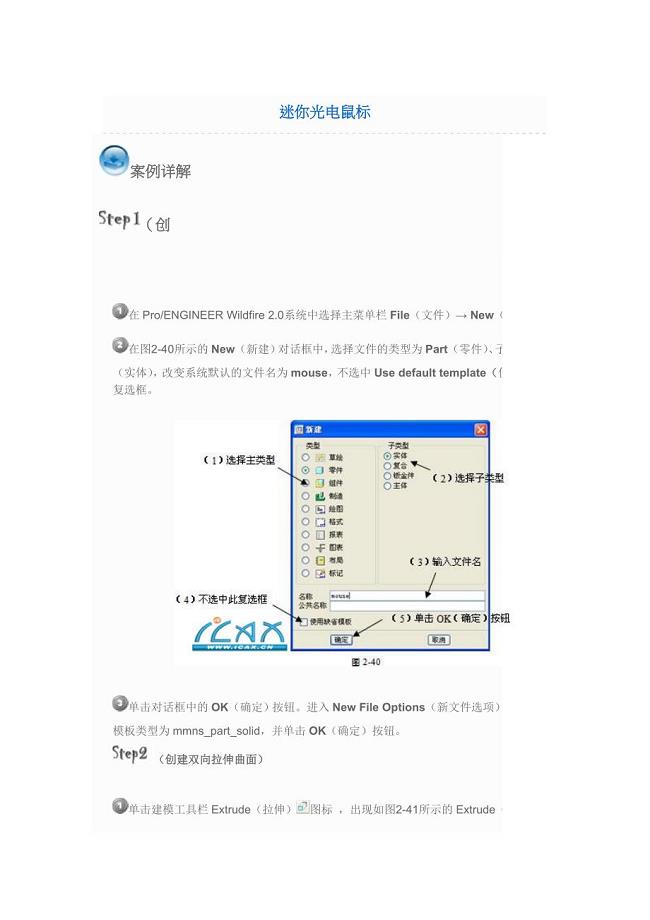
迷你光电鼠标产品设计手册
高中分班感言800字
2022年公务员辞职报告模板集锦八篇
幼儿园园务总结、幼儿园园务总结、幼儿园园务总结
129运动85周年观后感心得感悟
辖区内环境卫生与容貌执法情况的汇报.doc
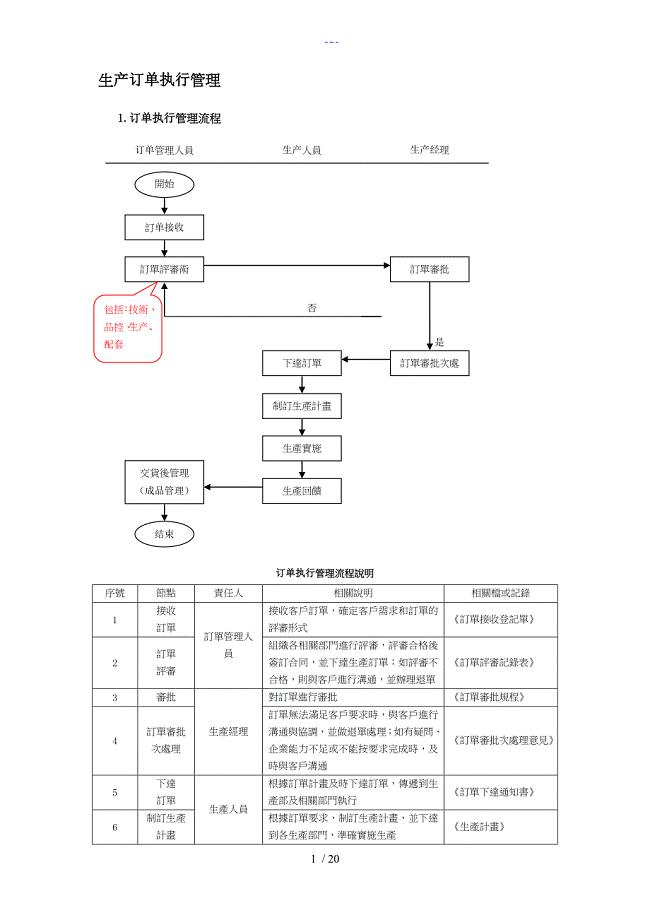
生产订单管理流程
2023年市国家税务局创新工作半年总结.docx
2023年北京市房山区河北镇惠景新苑社区工作人员考试模拟题及答案
福建省厦门市第十中学八年级上期中阶段评估物理试题
 哈夫曼码的编译码系统;递归替换问题;跳马问题;长整数运算问题;数据结构课程设计,课程设计
哈夫曼码的编译码系统;递归替换问题;跳马问题;长整数运算问题;数据结构课程设计,课程设计
2023-03-23 38页
毕业设计(论文)-YG型立式单级单吸管道离心泵设计(全套图纸)
2022-09-03 48页
社区卫生服务中心人员聘用制度
2023-06-03 4页
物业《人性的弱点》读后感
2023-03-30 4页
数据库设计说明书.doc
2022-12-21 13页
一年级语文下册专项练习
2023-12-25 21页
人教版八年级上册数学教学计划-最新
2022-11-17 3页
酒店客房服务质量对顾客满意度的影响研究--以苏州尼盛万丽酒店为例工商管理专业
2024-02-08 23页
黑格尔逻辑学读后感
2023-07-08 4页
2020初中化学中考模拟试题及答案
2022-09-03 10页