
机械原理课程设计自动盖章机设计
17页
1、湖南工业大学课程设计机械工程学院 学院(系、部)20152016袋学年第 2学期课程名称机械原理课程设计指导教师职称 教授 学生姓名专业班级 学号题 目自动盖章机的设计 成 绩 起止日期 2016年 6月20 日2016年6月24日目 录清单序号材料名称资料数量备注1课程设计任务书12课程设计说明书13课程设计图纸张456HUNAN UNIVERSITV OF TECHNOLOGV机械原理设计说明书自动盖章机起止日期:2016年6月20日至2016年6月24日学 生 姓 名班级学号成绩指导教师(签字)机械工程学院(部)2016年6月24日目录0.设计任务书11、 功能分解22、 机构的选用23、 机构的组合34、 方案详述95、 机构的设计106、 传动方案设计147、参考资料158、总结15湖南工业大学课程设计任务书2015 2016学年第2学期机械工程学院(系、部)专业 班级课程名称:机械原理课程设计设计题目:自动盖章机的设计完成期限:自2016年6月20日至2016年6月24日共1周内 容 及 任 务?设计任务(1)可采用目前传统印章(不用印泥),适用于常用的几种办公印章结构形状
2、;(2)实现在单页A3 ,B4,B5纸上盖章,纸的厚度为常见厚度,最大容许装纸量不少 于100弓K;(3)纸面盖章位置可任意调节;(4)每分钟盖章次数不少于10页;(5)电源电压为220V;(6)对于工作中出现的非正常情况或危险情况具有保护措施;适合于桌面工作,操作简单安全,盖章质量可靠,工作噪音低,结构轻巧,外形 美观。?设计提示(1)将纸盒中的一叠纸分成单页的方法很多,如靠机械推拉,离心力,摩擦力,静电等分离纸张。(2)在盖章的瞬间要求纸静止;因此,纸的输送机构应含有间歇运动机构。进度安排起止日期工作内容6、20-6、21构思该机械运动力某6、22-6、23运动分析及作图6、24整理说明书与答辩主要 参 资料1 朱理.机械原理M.北京:高等教育出版社,2008:15-2002邹慧君.机械原理课程设计M.北京:高等教育出版社,2009:15-250指导教师:2016年6月24 日一、功能分解为了实现在纸盒上自动打印记号的总功能,可将总功能分解为如下功能: 纸盒送到盖章的工位的功能;纸盒在盖章工位定位功能;盖章机的盖章功能;盖章后的输出功能二、机构的选用根据前述设计要求,并且根据技术、
3、经济及相容性要求,确定运动的执行元 件一一纸张输送机构,定位机构,盖章机构,输送机构,选用相应的机构来实现 各项运动的功能,。自动盖章机的机构选型功能执行构件工2动作执行机构输送纸张纸张输送机构水平往复运动凸轮机构连杆机构纸盒定位定位机构垂直间歇往复 运动凸轮机构连杆机构蛊章盖草机构铅直间歇往复 运动凸轮机构连杆机构纸张输送输送机构垂直间歇往复 运动凸轮机构连杆机构三、机构的组合纸张输送机构 备选方案一:机构特点:此方案采用凸轮机构+摇杆滑块机构,当凸轮的旋转时,推杆 将绕支架摆动,从而带动滑块在来回运摆动。通过将凸轮的旋转运动转换成滑 块的有急回运动的间歇往复运动来实现间歇送料的目的。优点:凸轮的使用容易实现预期的运动规律 ,滑块急回运动不明显,对 纸盒的冲击小。缺点:凸轮的旋转运动导致摇杆的摆动角度较小 ,滑块行程较短,对纸 盒的撞击速度不大,极易导致不能使纸盒送到预订的打印工位,工作效率低。备选方案二:77777777777777777777/机构特点:此方案采用曲柄滑块机构,当曲柄等速转动时,从动件变速往复摆 动,该机构可在曲柄长度一定的情况下,使执行构件滑块获得较大的行程。通
4、过将 轴的旋转运动转换成滑块的有急回特性的往复移动,可实现间歇送料的功能。优点:均为低副,具运动副元素为面接触,压力较小,承载能力较大,润滑好,磨 损小,加工制造容易,且连杆机构中的低副一般就是几何封闭,对保证工作的可靠 有利。此机构中滑块在两个极限位置时其瞬时速度为零 ,避免了当把纸盒送到工 位出产生机械上的冲击,从而避免了对纸盒的损害。此机构被设置成偏置的,能实 现快进慢回或慢进快回的运动特性。此设计中我们选择快进慢回的运动特性。缺点:机构的类型数据需精确,不然会对纸盒产生冲击。定位机构:备选方案一:构特点:此方案通过上置的凸轮机构,推动滚子导杆,控制定位杆的伸出或 缩进,从而控制物块运动或静止。优点:凸轮机构可以实现各种复杂的运动要求,而且结构简单、紧凑。易于控制导杆的长度可以自由设定,凸轮的行程不致太大,便于加工制造。还可以 控制输出,作为输出机构。缺点:需要弹簧的拉伸才能保证推杆紧贴凸轮运动,有一定的能量损失。 备选方案二:机构特点:此方案采用凸轮+连杆机构,通过将凸轮的旋转运动转换成定位 杆的垂直方向的往复运动,从而实现对工件进行定位的目的。优点:机构简单,便于制造,节约成
《机械原理课程设计自动盖章机设计》由会员re****.1分享,可在线阅读,更多相关《机械原理课程设计自动盖章机设计》请在金锄头文库上搜索。
《工程建设监理》自测题一
教师年度考核总结个人标准版(三篇)

四年级人教版语文下册按要求写句子考前专项练习含答案
售房居间合同
2019高考英语一轮优编选题 Unit 2 Poems(含解析)新人教版选修6
泰州光纤设备销售项目投资计划书
2022年珍惜资源的建议书汇编15篇
苏教版四年级语文下册《苹果里的五角星》课堂教案.doc
物业工程部年度工作总结例文(3篇).doc
2023年中班安全教案(集合篇)
精品专题资料(2022-2023年收藏)广州越秀区数字化智慧医院建设项目
员工职业发展重点规划填写表
河南省九年级数学上册第三章概率的进一步认识2用频率估计概率教案新版北师大版
阳光心理部总结
初中学生评语
服务行业工作心得
2012年建筑工程实务真题 - 副本
计算机的网络应用基础的
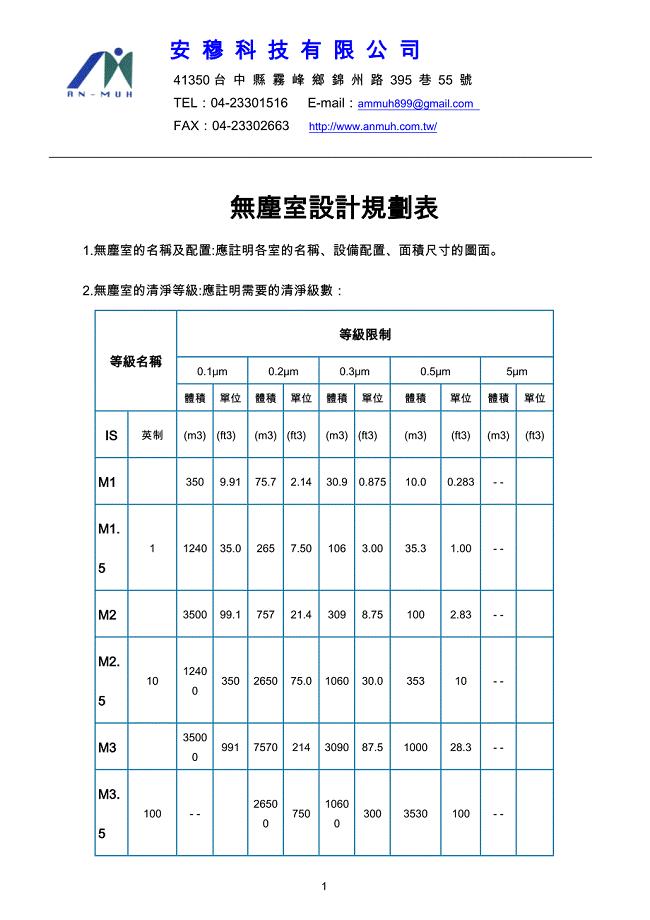
無塵室設計規劃表
感谢伤害你的人
 三级人力资源管理师试题含答案
三级人力资源管理师试题含答案
2023-04-02 19页
江苏省昆山市学九级上期中数学试卷含答案
2023-05-03 11页
国际采购合同
2023-10-31 4页
产品策划及可行性分析
2023-12-04 13页
畜禽屠宰管理条例草案
2023-12-19 12页
关于《公交都市考核评价指标体系》的说明
2023-11-25 26页
交通安全学习记录
2023-01-24 4页
六年级英语下册期末测试卷
2022-10-09 4页
五年级英语上册Unit4(14)教案北师大版
2023-05-11 3页
钢筋混凝土路面开工报告
2023-02-08 43页