
舞蹈机器人的开发与实现毕业论文
83页
1、舞蹈机器人的开发与实现毕业论文1 绪论机器人技术作为20世纪人类最伟大的发明之一,自20世纪60年代初问世以来,经历40余年的发展已取得长足的进步。未来的机器人是一种能够代替人类在非结构化环境下从事危险、复杂劳动的自动化机器,是集机械学、力学、电子学、生物学、控制论、计算机、人工智能和系统工程等多学科知识于一身的高新技术综合体。走向成熟的工业机器人,各种用途的特种机器人的多用化,昭示着机器人技术灿烂的明天。1.1国内外机器人技术发展的现状为了使机器人能更好的应用于工业,各工业发达国家的大学、研究机构和大工业企业对机器人系统开发投入了大量的人力财力。在美国和加拿大,各主要大学都设有机器人研究室,麻省理工学院侧重于制造过程机器人系统的研究,卡耐基梅隆机器人研究所侧重于挖掘机器人系统的研究,而斯坦福大学则着重于系统应用软件的开发。德国正研究开发MOVE AND PLAY机器人系统,使机器人操作就像人们操作录像机、开汽车一样。从六十年代开始日本政府实施一系列扶植政策,使日本机器人产业迅速发展起来,经过短短的十几年。到80年代中期,已一跃而为机器人王国。其机器人的产量和安装的台数在国际上跃居首位
2、。按照日本产业机器人工业会常务理事米本完二的说法:日本机器人的发展经过了60年代的摇篮期。70年代的实用期。到80年代进人普及提高期。并正式把1980年定为产业机器人的普及元年。开始在各个领域内广泛推广使用机器人。中国机器人的发展起步较晚,1972年我国开始研制自己的工业机器人。七五期间,国家投入资金,对工业机器人及其零部件进行攻关,完成了示教再现式工业机器人成套技术的开发,研制出了喷涂、点焊、弧焊和搬运机器人。1986年国家高技术研究发展计划开始实施,智能机器人主题跟踪世界机器人技术的前沿,经过几年的研究,取得了一大批科研成果,成功地研制出了一批特种机器人。20世纪90年代,我国的工业机器人又在实践中迈进一大步,先后研制出了点焊、装配、喷漆、切割、搬运等各种用途的工业机器人,并实施了一批机器人应用工程,形成了一批机器人产业化基地,为我国机器人产业的腾飞奠定了基础。1.2机器人技术的市场应用机器人融入我们日常生活的步伐有多快?据国际机器人联盟调查,20XX,全球个人机器人约有200万台,到20XX,还将有700万台机器人投入运行。按照韩国信息通信部的计划,到20XX,韩国每个家庭都能拥
3、有一台机器人;而日本机器人协会预测,到2025年,全球机器人产业的蛋糕将达到每年500亿美元的规模。与20世纪70年代PC行业的情况相仿,我们不可能准确预测出究竟哪些用途将推动这个新兴行业进入临界状态。不过看起来,机器人很可能在护理和陪伴老年人的工作上大展宏图,或许还可以帮助残疾人四处走走,并增强士兵、建筑工人和医护人员的体力与耐力。目前,我国从事机器人研发和应用工程的单位200多家,拥有量为3500台左右,其中国产占20,其余都是从日本、美国、瑞典等40多个国家引进的。20XX已生产各种类型工业机器人和系统300台套,机器人销售额6.74亿元,机器人产业对国民经济的年收益额为47亿元,我国对工业机器人的需求量和品种将逐年大幅度增加。1.3机器人技术的前景展望机器人是人类的得力助手,能友好相处的可靠朋友,将来我们会看到人和机器人会存在一个空间里边,成为一个互相的助手和朋友。机器人会不会产生饭碗的问题。我们相信不会出现机器人上岗,工人下岗的局面,因为人们随着社会的发展,实际上把人们从繁重的体力和危险的环境中解放出来,使人们有更好的岗位去工作,去创造更好的精神财富和文化财富,机器人来做这些
4、危险环境的工作,展望21世纪机器人将是一个与20世纪计算机的普及一样,会深入地应用到各个领域,所以很多专家预测,在21世纪的前20年是机器人从制造业走向非制造业的发展一个重要时期,也是智能机器人发展的一个关键时期,目前国际上很多国家,也对机器人对人类社会的影响的估计提出了新的认识,同时,我们也可以看到机器人技术,涉及到多个学科,机械、电工、自动控制、计算机测量、人工智能、传感技术等等,它是一个国家高技术实力的一个重要标准。语音识别处理是语音功能的一个重要方面,目前计算机语音识别处理过程基本上一致,是一种基于统计模式识别的理论。我国的语音识别研究起步于五十年代,近年来发展很快,其研究水平基本与国外同步,在汉语语音识别技术上还有自己的特点和优势。可以预计,语音技术的发展前景无限。2舞蹈机器人设计的内容和要求2.1 舞蹈机器人设计的内容随着现代科技的发展,机器人技术已广泛应用于人类社会生活的各个领域,特别是舞蹈机器人具有人类外观特征、可爱的外貌、又兼有技术含量,极受青少年的喜爱。本课题要求设计一具有简单人体功能的、模拟舞蹈动作的类人型机器人,完成简单人体舞蹈的基本动作:可以前进后退,左右侧行
《舞蹈机器人的开发与实现毕业论文》由会员壹****1分享,可在线阅读,更多相关《舞蹈机器人的开发与实现毕业论文》请在金锄头文库上搜索。
浅谈人民币汇率制度的选择
毕业生实习鉴定表个人鉴定
“让校园充满爱”主题班会活动方案
常用污水处理设备及去除率
公司内部股权转让协议经典版(八篇).doc
商业计划书的编制参考
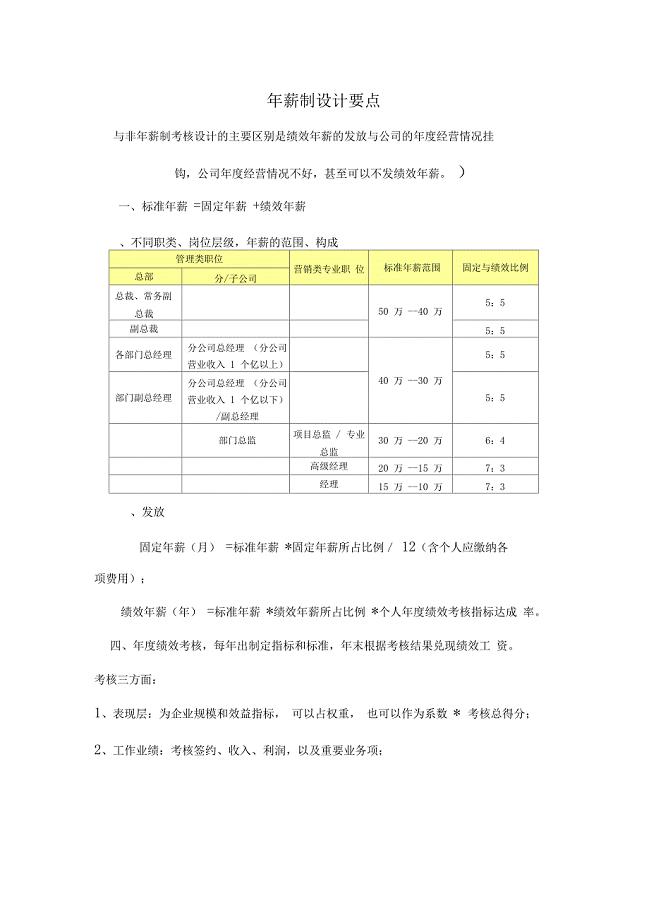
年薪制设计要点及细则参考

假期社会实践心得

茂名PCB研发项目投资计划书_模板范文

【施工方案】鄂州互通立交墩台施工方案(DOC 22页)
小学一年级班主任工作总结范文4篇2
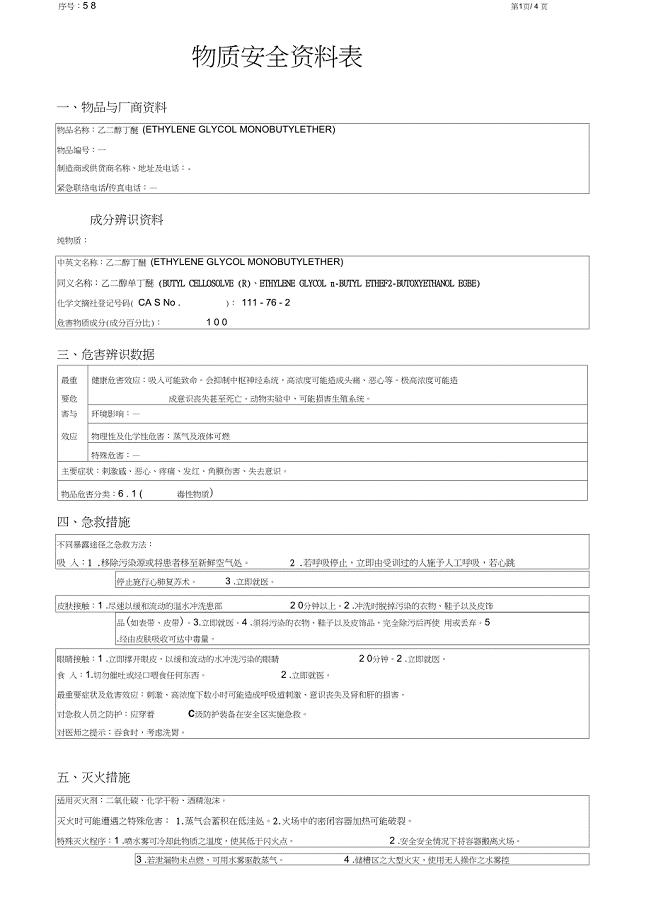
乙二醇丁醚(ETHYLENEGLYCOLMONOBUTYLETHER)化学物质安全资料表
教育教学工作总结二
保证书500字
混凝土结构施工安全防护措施正式版
稀土发光材料的开题报告
幼儿教育评价课程心得体会
(保证书)国庆遵纪守法保证书
车辆工程专业毕业设计汽车整车论文
电销业务员工作计划标准模板(七篇).doc
 高中英语外研版选修8学案:Module 3 模块尾核心要点回扣 含解析精修版
高中英语外研版选修8学案:Module 3 模块尾核心要点回扣 含解析精修版
2022-10-17 18页
2023年山东省专升本计算机考试真题新编
2022-08-10 14页
江苏省南通市高三第三次模拟考试生物试题
2024-02-12 11页
高中地理人教版必修二学案:第6章 附4 海洋权益与海洋发展战略 Word版含答案
2023-09-02 9页
制砖厂安全生产事故应急救援预案
2022-10-13 42页
应急计划与预案
2023-10-18 10页
2023年学校迎新生特色活动方案
2023-01-23 12页
PLC实训总结报告
2023-02-16 12页
2023年中小功率激光切割行业分析报告
2022-10-31 5页
曹禺雷雨中主要人物形象评析
2022-10-09 21页