
机电一体化课程设计-X-Y数控工作台机电系统设计
27页
1、全套图纸加153893706机电一体化课程设计说明书题 目: X-Y工作台机电系统设计姓 名 专 业 机械设计制造及其自动化 学 号 指导教师 信息与工程学院 2013年6月17日前 言课程设计是机床机电一体化系统课程的十分重要实践环节之一。通过课程设计可以初步树立正确的设计思想,了解有关的工业政策,学会运用手册、标准、规范等资料;培养学生分析问题解决问题的实际能力,并在教师的指导下,系统地运用课程和选修课程的知识,独立完成规定的设计任务。一种经济型数控机床的控制系统,包括机床伺服系统和对该伺服系统进行控制的;其特征在于,还包括通过通信接口与通信的触摸屏,所述触摸屏包括:数据输入模块,用于输入、修改被控参数的参数值和操作指令,读取触摸屏的操作界面;数据存储模块,用于存储输入、输出数据;数据处理计算模块,用于对输入、输出参数数据进行处理、计算;包括输入信号的编码运算;输出信号的解码运算;数据存储单元,用于存储移位单元传递来的数据;数据检测单元,用于实时检测坐标轴的当前运动状态参数值,包括距离、速度值,以及控制方式参数值;数据比较单元,用于将检测单元检测到的坐标轴当前运动状态参数值、控制方
2、式参数值与触摸屏存储模块的设定值进行比较; X-Y数控工作台机电系统设计采用步进电机作为驱动装置。步进电机是一个将脉冲信号转移成角位移的机电式数模转换器装置。其工作原理是:每给一个脉冲便在定子电路中产生一定的空间旋转磁场;由于步进电机通的是三相交流电所以输入的脉冲数目及时间间隔不同,转子的旋转快慢及旋转时间的长短也是不同的。由于旋转磁场对放入其中的通电导体既转子切割磁力线时具有力的作用,从实现了旋转磁场的转动迫使转子作相应的转动,所以转子才可以实现转子带动丝杠作相应的运动。本题目是步进电机,微型计算机,插补原理,汇编语言的综合应用,本题目设计得到了老师的帮助和支持,最后在此表示感谢。本题目由共分六章,第一章课程设计的目的、意义及要求;第二章课程设计的内容,第三章课程设计总体方案的确定;第四章主要涉及了机械系统设计;第五章主要涉及工作台机械装配图的绘制;第六章主要涉及控制系统软件设计;最后是结束语和参考文献。因本人水平有限,错误和不足之处在所难免,处理问题也有不妥之处,敬请相关老师批评指正。课程设计的目的、意义及要求X-Y数控工作台是许多机电一体化设备的基本部件,如数控车床的纵-横向进刀
3、机构、数控铣床和数控钻床的X-Y工作台、激光加工设备的工作台、电子元件表面贴装设备等。因此,选择X-Y数控工作台作为机电综合课程设计的内容,对于机电一体化专业的教学具有普遍意义。 模块化的X-Y数控工作台,通常由导轨座、移动滑块、工作平台、滚珠丝杠螺母副以及伺服电动机等部件构成。其外观形式如图1所示。其中,伺服电动机作为执行元件用来驱动滚珠丝杠,滚珠丝杠的螺母带动滑块和工作平台在导轨上运动,完成工作台在X、Y方向的直线移动。导轨副、滚珠丝杠螺母副和伺服电动机等均已标准化,由专门厂家生产,设计时只需根据工作载荷选取即可。控制系统根据需要,可以选用标准的工业控制计算机,也可以设计专用的微机控制系统。图1 X-Y数控工作台外形机电一体化课程设计是一个重要的时间性教学环节,要求学生综合的运用所学的理论知识,独立进行的设计训练,主要目的与要求:1、 通过设计,使学生全面地、系统地了解和掌握数控机床的基本组成及其想怪知识,学习总体的方案拟定、分析与比较的方法。2、 通过对机械系统的设计,掌握几种典型传动元件与导向元件的工作原理、设计计算及选用的方式。3、 通过对机械系统的设计,掌握常用伺服电机的工
4、作原理、计算控制方法与控制驱动方式。4、 培养学生独立分析问题和解决问题的能力,学习并树立“系统设计”的思想。5、 锻炼提高学生应用手册和标准、查阅文献资料及撰写科技论文的能力。目录课程设计的目的、意义及要求31、总体方案设计51.1 设计任务51.2 总体方案确定51.2.1 方案确定思想51.2.3 总体方案系统组成52、机械系统设计72.1 工作台外形尺寸及重量估算72.2 导轨的设计计算与选择72.2.1对X轴向导轨的计算72.2.2对X轴导轨的选择82.2.3对Y轴导轨的计算92.2.4对Y轴导轨选择92.3 滚珠丝杆的设计计算102.3.1最大工作载荷的计算102.3.2滚珠丝杠的选取112.3.3滚道半径、偏心距122.3.4稳定性校核122.3.5刚度的验算122.3.6效率验算132.4步进电动机的计算、选型与校核132.4.1确定系统脉冲当量及步距角132.4.2电动机轴上的转动惯量J总132.4.3步进电机空载启动时,电机轴上的加速力矩132.4.4工作台移动部件折算到电机轴上的摩擦力矩142.4.5因丝杆副预紧力引起的电机轴上的附加摩擦转矩142.4.6负载转矩
《机电一体化课程设计-X-Y数控工作台机电系统设计》由会员夏**分享,可在线阅读,更多相关《机电一体化课程设计-X-Y数控工作台机电系统设计》请在金锄头文库上搜索。
文明青少年演讲稿3篇
新版市场营销专业大学生毕业实习报告

人身伤亡事故现场应急处置方案
重阳节孝敬长辈寄语文案
公司合同管理实务正稿(一)
形容冬天的优美句子
档案员业务工作
过妇女节感悟作文初一范文5篇.doc
学校交通安全工作计划样本(二篇).doc

2023年谁动了我奶酪观后感100字10篇范本
中国房地产企业集团管控模(共5页)
2022亚马逊电商运营员工作总结四篇
工厂员工劳动合同
高三生物二轮复习课时作业微生物的利用和生物技术在食品加工中的应用
2018师德师风会议
组织行为学:第9章 冲突与谈判
本人自我鉴定初中3篇个人自我鉴定初中
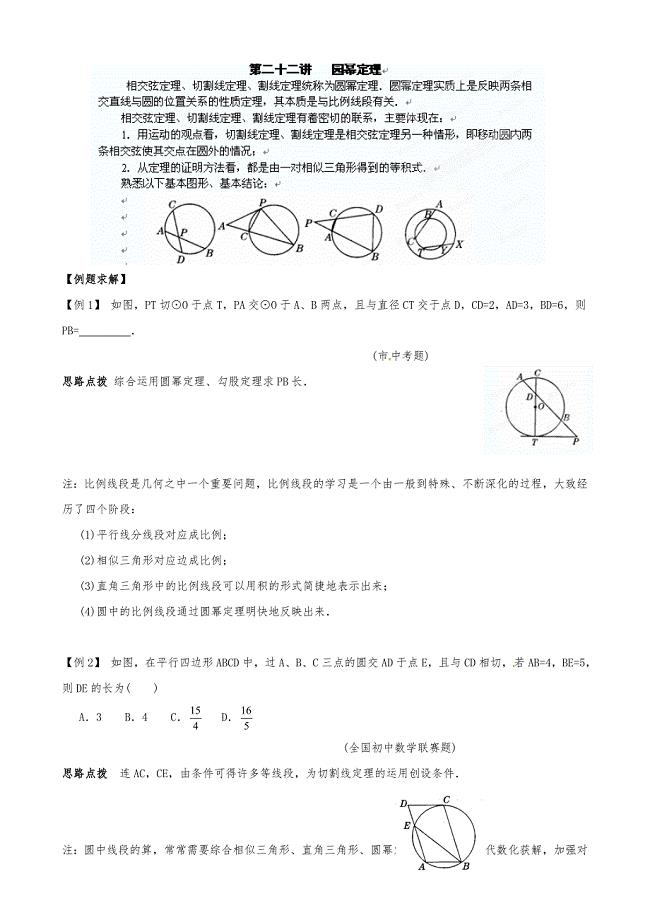
九年级数学同步培优竞赛详附答案-22第二十二讲-圆幂定理
近距离看美国之一:历史的忧虑读书笔记
工作期间外出的管理规定
 毕业设计(论文)-Proe在机械设计中的应用--铣刀头的设计与装配
毕业设计(论文)-Proe在机械设计中的应用--铣刀头的设计与装配
2022-09-25 56页
毕业设计(论文)-C#商场在线购物网站系统设计
2022-08-12 48页
唐山市南湖西北片区震后危旧平房改造安臵小区二期工程施工装置设计
2023-10-05 53页
业设计(论文)-移动模架造桥机结构有限元分析(全套图纸三维)
2023-12-07 28页
机械制造装备设计课程设计-法兰钻孔夹具设计
2024-01-14 16页
毕业设计(论文)-箱体加工工艺及镗两侧面大孔夹具设计
2023-06-14 26页
毕业设计报告-工控系统安全态势感知建模与算法实现
2024-01-11 64页
毕业设计(论文)-安检便携式金属探测器的方案设计
2024-03-13 22页
在学习“四史”专题党课上的辅导报告
2022-12-05 17页
人教版小学数学二年级上册数学广角搭配教学实录.doc
2023-04-27 6页