
多传感器数据融合算法汇总
25页
1、一、背景介绍:多传感器数据融合是一种信号处理、辨识方法,可以与神经网络、小波变换、kalman滤波技术结合进一步得到研究需要的 更纯净的有用信号。多传感器数据融合涉及到多方面的理论和技术,如信号处 理、估计理论、不确定性理论、最优化理论、模式识别、神经网 络和人工智能等。多传感器数据融合比较确切的定义可概括为: 充分利用不同时间与空间的多传感器数据资源,采用计算机技术 对按时间序列获得的多传感器观测数据,在一定准则下进行分 析、综合、支配和使用,获得对被测对象的一致性解释与描述, 进而实现相应的决策和估计,使系统获得比它的各组成部分更充 分的信息。多传感器信息融合技术通过对多个传感器获得的信息进行 协调、组合、互补来克服单个传感器的不确定和局限性,并提高 系统的有效性能,进而得出比单一传感器测量值更为精确的结 果。数据融合就是将来自多个传感器或多源的信息在一定准则下 加以自动分析、综合以完成所需的决策和估计任务而进行的信息 处理过程。当系统中单个传感器不能提供足够的准确度和可靠性 时就采用多传感器数据融合。数据融合技术扩展了时空覆盖范 围,改善了系统的可靠性,对目标或事件的确认增加了可
2、信度, 减少了信息的模糊性,这是任何单个传感器做不到的。实践证明:与单传感器系统相比,运用多传感器数据融合技 术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存 能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并 提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时 性和信息利用率等。信号级融合方法最简单、最直观方法是加权平均法,该方法将一 组传感器提供的冗余信息进行加权平均,结果作为融合值,该方 法是一种直接对数据源进行操作的方法。卡尔曼滤波主要用于融 合低层次实时动态多传感器冗余数据。该方法用测量模型的统计 特性递推,决定统计意义下的最优融合和数据估计。多传感器数据融合虽然未形成完整的理论体系和有效的融 合算法,但在不少应用领域根据各自的具体应用背景,已经提出 了许多成熟并且有效的融合方法。多传感器数据融合的常用方法 基本上可概括为随机和人工智能两大类,随机类方法有加权平均 法、卡尔曼滤波法、多贝叶斯估计法、产生式规则等;而人工智 能类则有模糊逻辑理论、神经网络、粗集理论、专家系统等。可 以预见,神经网络和人工智能等新概念、新技术在多传感器数据 融合中将起到越来越重
3、要的作用。数据融合存在的问题(1) 尚未建立统一的融合理论和有效广义融合模型及算法;(2) 对数据融合的具体方法的研究尚处于初步阶段;(3) 还没有很好解决融合系统中的容错性或鲁棒性问题;(4) 关联的二义性是数据融合中的主要障碍;(5) 数据融合系统的设计还存在许多实际问题。二、算法介绍:2.1多传感器数据自适应加权融合估计算法:设有n个传感器对某一对象进行测量,如图1所示,对于不同 的传感器都有各自不同的加权因子,我们的思想是在总均方误差 最小这一最优条件下,根据各个传感器所得到的测量值以自适应 的方式寻找各个传感器所对应的最优加权因子,使融合后的X值 达到最优。最优加权因子及所对应的均方误差:(多传感器方法的理论依据:设n个传感器的方差分别为。,21。,。;所要估计的真值为X ,各传感器的测量值分别 222n为X1, X2,Xn,它们彼此互相独立,并且是X的无偏估计; 各传感器的加权因子分别为W1, W2,Wn,则融合后的X值 和加权因子满足以下两式:总均方误差为b 2 = E工W2(X -X + 2 工 W W(X - X )(X - X )1ppp qpq1- p=1p=1,
4、q=1因为X 1,X 2,X n彼此独立,并且为X的无偏估计, 所以 E (X-Xp)(X-Xq) =0,(p Hq;p =1 ,2 ,,n;q =1, 2,n),故。2可写成从式可以看出,总均方误差。2是关于各加权因子的多元二次函 数,因此02必然存在最小值。该最小值的求取是加权因子W1, W2, Wn满足式约束条件的多元函数极值求取。根据多元函数求极值理论,可求出总均方误差最小时所对应的加权因子第 3页此时对应的最小均方误差为:G2二1/ 丄minG 2p=1 p以上是根据各个传感器在某一时刻的测量值而进行的估计,当估计真值X为常量时,则可根据各个传感器历史数据的均值来进行估计。设X (k)=-丈 X (i)(p = 1,2,n)此时估计值为X = WX (k)pkpp pi =1p=1总均方误差为亍2 = E(X - X)1=E工 W 2 (X - X (k )一 一ppp=1+ 2 工 WW (X - X (k )(X - X (k )p qpqp=1,q=1p丰q同理,因为X1, X2,,Xn为X的无偏估计,所以Xl(k), X2(k),,X n(k )也一定是X的无偏估计,
《多传感器数据融合算法汇总》由会员新**分享,可在线阅读,更多相关《多传感器数据融合算法汇总》请在金锄头文库上搜索。
九年级英语上册 Lesson 38 课时训练 冀教版
《花样年华》规划简案
电工基础知识考试历年真题汇总含答案参考20
小学音乐教师工作总结范文5篇
长隧道及斜井施工组织设计完整版
J型天线的实际制作
2018年筹备工作座谈会发言稿
智能安全防范系统可行性方案
煤炭业务承包合同律师版(2篇).doc
八月份后勤工作计划范文(三篇).doc
如何在培训中调动学员积极性
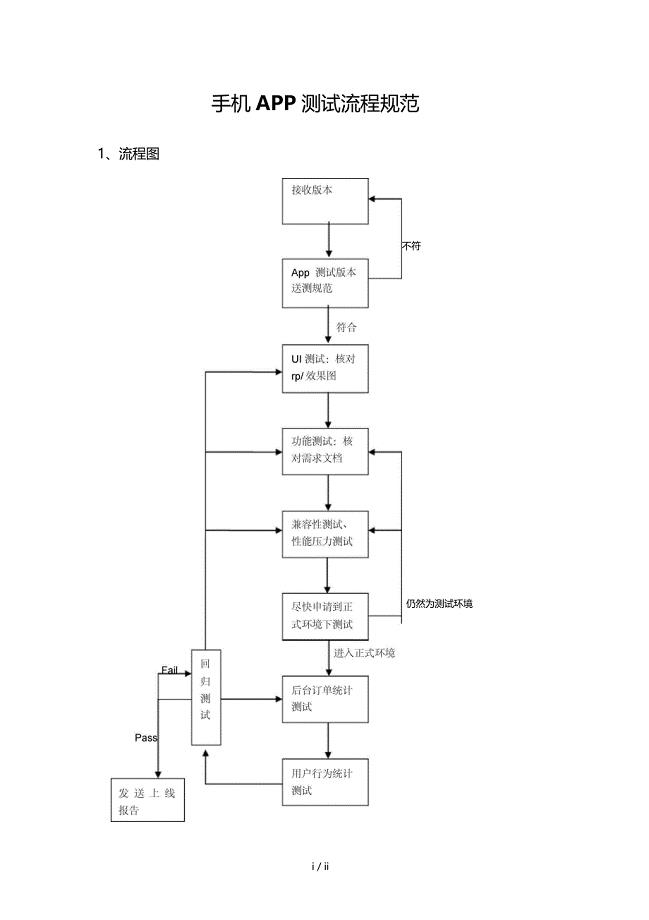
手机APP测试流程规范
2023年作为幼儿教师心得体会优质
北京市房屋租赁协议精编版(9篇)
用人单位实行特殊工时制度申请报告
成本管理会计习题
眼科医生的优秀的年终工作年度个人考核总结(3篇).doc
建筑施工安全的五大不利因素
浅论培育与弘扬民族精神

北京理工大学21秋《预算会计》在线作业二满分答案18
 实行总分包的企业对分包单位资质人员资格管理制度
实行总分包的企业对分包单位资质人员资格管理制度
2022-07-20 5页
盐水喷雾实验机操作规程
2023-08-31 2页
防寒过冬安全管理措施
2023-07-18 11页
工资考核方案
2022-08-29 28页
顺序结构选择结构和循环结构的程序设计典型例题分析与解答
2022-09-19 5页
技术交底记录(混凝土雨水方涵、污水管道基槽开挖)
2023-03-21 1页
机床电气控制课程设计机床工作台的往复运动
2023-08-08 11页
执行力基本含义word精品文档24页
2024-02-19 24页
会员服务协议书
2023-04-23 11页
环保企业的商业模式解读
2023-06-10 3页