
电力拖动与控制系统课程设计-V-M双闭环直流可逆调速系统设计2
25页
1、摘要本设计是基于V-M调速系统的直流电动机可逆调速系统,设计中使用工程法对双闭环调速系统的ACR及ASR进行整定。主电路采用由晶闸管构成的三相桥式可控整流电路,可逆方案采用两组晶闸管反并联的方式,晶闸管的触采使用由集成芯片TC787构成的触发电路。系统同时还具有过压、过流、缓冲保护等措施。系统不论是稳态性能还是动态性能都满足了设计要求。关键字 :双闭环 可逆调速 三相桥式整流 TC787 目录1 概述12 设计任务及要求22.1 设计任务22.2设计要求23 理论设计33.1 方案论证33.1.1 可逆调速方案的选择33.1.2 控制方案的选择33.2 系统设计53.2.1 电流调节器设计63.2.1.2确定时间常数63.2.1.3确定电流调节器结构73.2.1.4计算电流调节器参数73.2.1.5 校验近似条件73.2.1.6 计算调节器电阻和电容83.2.2 速度调节器设计93.2.2.1 确定转速调节器时间常数93.2.2.2 选择转速调节器结构93.2.2.3 计算转速调节器的参数93.2.2.4 校验近似条件93.2.2.5 计算调节器电阻和电容103.2.2.6 校核转速超
2、调量104 系统主电路设计114.1 主电路原理图及说明114.2 主电路参数计算及选型124.2.1整流变压器的计算124.2.2平波电抗器的计算134.3 晶闸管元件的选型134.4 保护电路的设计134.4.1过压保护电路134.4.2 过电流保护电路144.4.3 缓冲电路设计155 控制及驱动电路设计165.1 触发电路设计165.2调节器设计175.3系统辅助电源设计186总结与体会196.1 设计总结196.2 心得体会19参考文献20V-M双闭环直流可逆调速系统设计1 概述直流电动机具有良好的起、制动性能,宜于在广泛范围内平滑调速,在轧钢机、矿井卷扬机、挖掘机、海洋钻机、金属切削机床、造纸机、高层电梯等需要高性能可控电力拖动的领域中得到了广泛的应用。近年来,交流调速系统发展很快,然而直流拖动系统无论在理论上和实践上都比较成熟,并且从反馈闭环控制的角度来看,它又是交流拖动控制系统的基础,所以直流调速系统在生产生活中有着举足轻重的作用。 有许多生产机械要求电动机既能正转,又能反转,而且常常还需要快速地起动和制动,这就需要电力拖动系统具有四象限运行的特性,而常用的电力电子器件
3、,比如大功率晶闸管不具有双导电性,此时的电机调速系统就需要专用的可逆电力电子装置和自动控制系统。常用的电机调速控制系统有转速闭环控制系统和电流闭环控制系统,二者都可以在一定程度上克服开环系统造成的电动机静差率、调速范围不满足设计要求的情况。实际设计中常采用转速、电流双闭环控制系统,一般使电流环作为控制系统的内环,转速环作为控制系统的外环,以此来调高系统的性能。2 设计任务及要求2.1 设计任务设计V-M双闭环直流可逆调速系统1)技术数据: 晶闸管整流装置:Rrec=0.5,Ks=40。 负载电机额定数据:PN=8.5KW,UN=230V,IN=37A,nN=1450r/min,Ra=1.0,Ifn=1.14A,GD2=2.96N.m2 系统主电路:Tm=0.07s,Tl=0.017s 2)技术指标 稳态指标:无静差(静差率s2, 调速范围 D10 ) 动态指标:电流超调量:5%,起动到额定转速时的超调量:8%,(按退饱和方式计算)3) 根据题目的技术要求,分析论证并确定主电路的结构型式和闭环调速系统的组成,画出系统组成的原理框图 4) 调速系统主电路元部件的确定及其参数计算(包括有变压
4、器、电力电子器件、平波电抗器与保护电路等) 5) 动态设计计算:根据技术要求,对系统进行动态校正,确定ASR调节器与ACR调节器的结构型式及进行参数计算,使调速系统工作稳定,并满足动态性能指标的要求 6) 绘制V-M双闭环直流可逆调速系统的电气原理总图(要求计算机绘图) 2.2设计要求(1) 该调速系统能进行平滑的速度调节,负载电机可逆运行,具有较宽的调速范围(D10),系统在工作范围内能稳定工作 (2) 系统静特性良好,无静差(静差率s2) (3) 动态性能指标:转速超调量n8%,电流超调量i5%,动态速降n10%,调速系统的过渡过程时间(调节时间)ts1s (4) 系统在5%负载以上变化的运行范围内电流连续 (5) 调速系统中设置有过电压、过电流等保护,并且有制动措施3 理论设计3.1 方案论证3.1.1 可逆调速方案的选择使电机能够四象限运行的方法有很多,可以改变直流电机电枢两端电压的方向,可以改变直流电机励磁电流的方向等等,即电枢电压反接法和电枢励磁反接法。电枢励磁反接方法需要的晶闸管功率小,适用于被控电机容量很小的情况,励磁电路中需要串接很大的电感,调速时,电机响应速度较慢,
《电力拖动与控制系统课程设计-V-M双闭环直流可逆调速系统设计2》由会员cn****1分享,可在线阅读,更多相关《电力拖动与控制系统课程设计-V-M双闭环直流可逆调速系统设计2》请在金锄头文库上搜索。
幼儿园大班节奏乐活动乘车去秋游
农村教师健康知识研究述评
![最大的书导学案[精选文档]](https://union.152files.goldhoe.com/2023-7/8/551c63fc-465f-4b30-a2e6-08aa8a899b33/pic1.jpg)
最大的书导学案[精选文档]
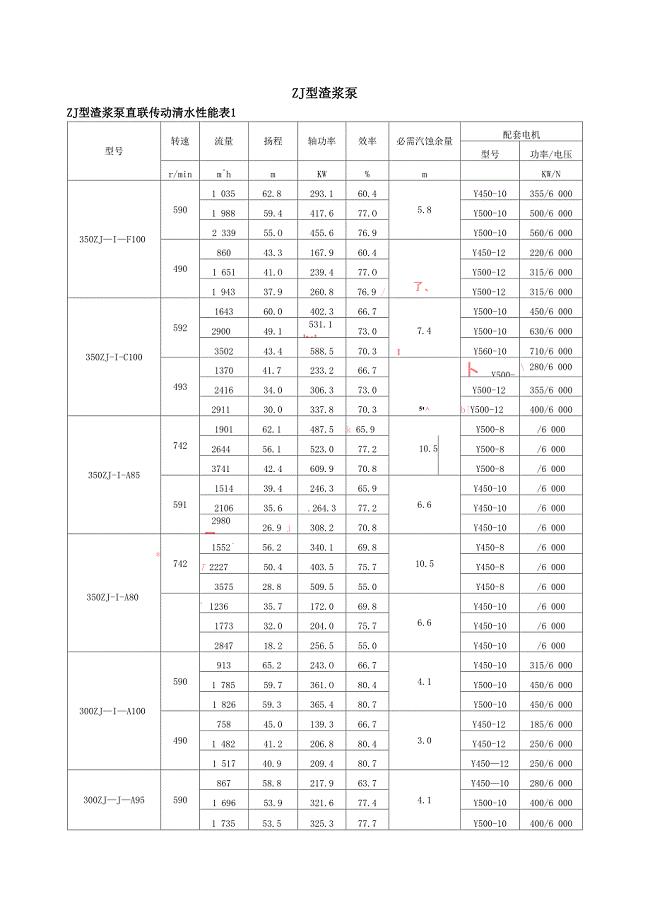
ZJ系列渣浆泵性能参数
八年级生物上册期中考试试题及答案
应用文个人工作总结(二篇).doc
预埋件施工方案
2022年人力资源管理师-人力资源管理师(二级)考试题库10

初中宾语从句详细讲解与练习(上课)
株洲压力容器研发项目商业计划书
蘑菇羊肉火锅贵州特色火锅系列
五年级冀教版长方体与正方体的体积表面积练习题
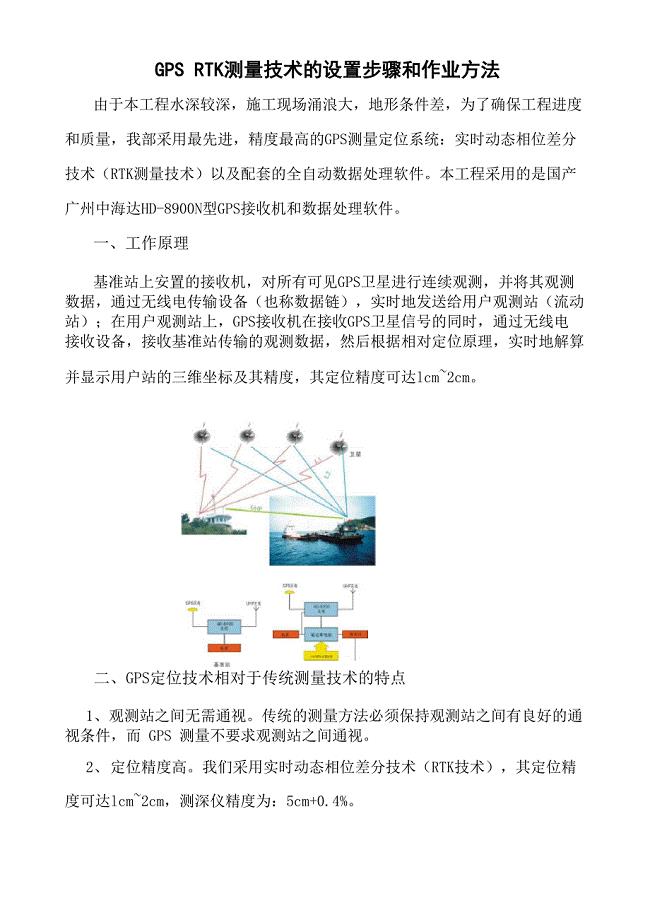
RTKGPS测量的工作原理
2023年10月自考市场营销学00058试题及答案解析
2022幼儿园大班健康教育工作计划五篇范文
2021年文艺晚会主持词3篇
长春智能装备设计项目投资计划书
西部计划志愿者2023年终工作总结范文.doc

浅谈企业内部会计控制制度

发电机转子磁轭冲片冲压成形工艺与模具设计说明书
 我国中小企业的战略管理现状、问题与对策
我国中小企业的战略管理现状、问题与对策
2023-07-30 16页
新文旅背景下洛阳导游培训探讨
2023-01-15 23页
泵站维修改造工程施工组织设计.doc
2023-05-17 54页
《数学建模》课程设计报告--常染色体遗传模型
2022-12-04 13页
对中小企业全面预算管理的研究
2023-05-21 25页
大断面岩巷快速掘进爆破参数优化
2023-01-20 7页
《数字电子技术》课程设计八路抢答器设计控制电路
2022-10-20 23页
均线战法研究
2023-01-29 24页
以比赛为契机提高学生的足球兴趣
2023-07-24 2页
CNG加气站安全管理制度.doc
2022-12-09 61页
2024年春江苏开放大学机械设计第3次作业答案2024年春江苏开放大学机器学习形考作业二答案2024年春江苏开放大学测试技术综合性大作业答案2024年春江苏开放大学python程序设计形考作业1答案实验报告2024春国开形势与政策大作业参考答案 二2024年春季国家开放大学《形势与政策》形成性考核作业参考答案2024春国开《教育法学》形考作业1至4试题国家开放大学2023秋《个人理财-厦门》大作业参考答案国家开放大学《 生产与运作管理》形考任务1-5参考答案2024年春国家开放大学《形势与政策》形考作业参考答案二2024年春国开《法治思想概论》形考作业参考答案国家开放大学《市场营销学》形考任务1-4参考答案