
机械系统仿真报告
37页
1、机械系统仿真SIMULATIONS OF MECHANINICAL SYSTEM目录机械系统仿真课程设计任务书平面四杆机构的运动学仿真三.曲柄滑块机构运动与动力学仿真配气凸轮机构运动与动力学仿真五.总结机械系统仿真课程设计任务书学院名称:专业:年级:学生姓名:学号:指导教师:1 设计题目典型机械机构仿真分析2 主要内容图 1 平面四杆机构图 2 曲柄滑块机构图 3 配气凸轮机构3 具体要求(1)完成上述机构的运动仿真(运动参数:Angular Velocity = deg/s);( 2) 仿真结果包括:运动轨迹、速度、加速度、运动副反力及驱动力矩等;4 完成后应上交的材料课程设计分析报告 1 份,字数不少于 8000 字。要求:(1)报告包括封面、中文摘要、目录、分析报告正文、参考文献等;(2)报告正文包括:机械系统仿真的目的意义,仿真分析内容(应有必要的文字和插图),课程设计总 结与体会。5 推荐参考资料1 张晋西. Solidworks 及 COSMOSMotion 机械系统仿真.北京:清华大学出版社,2007指导教师签名日期2011年 12月丄日系主任审核日期2011年 12月丄
2、日前言:由于上机时间有限,而且有些图不方便截取,因此用网上查找图片(装配零件不同)代替,仅表示操作过程,另有不同的地方会具体说明。数据:运动参数Angular Velocity = 389 deg/s,(第三个零件配气凸轮机构取15290deg/s)平面四杆机构的运动学仿真一、具体要求 对平面四杆杆机构进行运动学仿真,绘制曲柄,连杆,摇杆质心位置处的运动轨迹、速度和加速度,绘制主运动副处的驱 动力/力矩。二、Solidworks2006SP0 软件操作步骤1、从程序或者桌面学习软件文件夹中启动Solidworks2006SP0软件。2、在Solidworks软件中打开平面四杆机构的装配模型。操作步骤如图2.1、2.2所示。预览I打开)卜I配胃参考(Z)打开收藏| 口 SolidWorks Office Professional 2006文件(日视图加工具帮助(也I连杆机构取消W桌面我的文档0预览址)厂高级C)厂只看) 厂轻化文件名(S):文件类型広):|SolidWorks 文件(*. sldprt: *. sldasm;Descripti on我黑近查找范围0):fcnxr ar图
3、2.1 打开文件$厅离& 曲连杆机构(默认Display State-1+ Al注解+ Desig n Bin der+边光源0前视基准面&上视基准面$右视基准面L原点 區也(f)机架i 園感(-)曲柄e 隱爲(-)连杆Vl 酸爲(-)揺杆1 0 配合卷 重合1(机架i,曲柄i 同心i(机架勺,曲柄 卷 重合2(曲柄1,连杆1 心重合3(机架1,摇杆1 箱同心4(机架摇杆1 爲 Concentric 1 (连杆 Vl,摇 g Concentric2 (曲柄Vl,连2.2平面四杆机构的装配模3、单击图2.2中管理器的丄按钮,管理器发生变化如图2.3所示。Motion Model日需j Assembly Components 嗚摇杆J 感曲柄 臨机架-1 感连杆1-$ Parts 褊 Moving Parts 無I Ground Parts日瞬)匚onstraints 卜JointsQ Contact電匚匸Wl已出吟 Motion曰爭Forces jo Springs Q Dampers 仑 Bushings 、Action Only% Action/Reaction(=l JU Resu
4、lts 浜 Trace Path Q Linear Disp D Angular Disp j兔 Velocity 卞 Acceleration 吝R已action Fdf匚已 嘔 XY Plots图 2.3 Motion 管理器4、选中管理器中的“Motion Model”,右击鼠标弹出菜单如图2.4。II1Mutiun Moi|p|疇 Asseml 0摇; 範曲;睜连; -嗚 Parts-翳匚onstrMaterial卜IntelliMotion BuilderWelcome.About.Help.ILQLLSystem DefaultsDisplay ParametersAnimation ParametersPlot Defaults图 2.45、选中弹出菜单中的“Intellimotion Builder”,弹出Intellimotion Builder对话框如图2.5所示。对话框首先显示Units页,供用户设置力(换成常用单位牛顿)和时间单位(秒)。单击“Next”继续,出现图2.6,供用户设置重力方向。图 2.5图 2.66、定义可动的和固定的零件单击“Next”继续,出
《机械系统仿真报告》由会员人***分享,可在线阅读,更多相关《机械系统仿真报告》请在金锄头文库上搜索。

《贺循字彦先》阅读
教师下半年个人工作计划标准范本(2篇).doc
高三作文常用的名言警句

部编版语文初二下册 第一单元综合检测试题含答案
下半年消防的工作计划模板(3篇).doc
![主体结构验收流程[共4页]](https://union.152files.goldhoe.com/2023-3/19/0b9f8a86-5f9f-4117-a99f-457026d894a1/pic1.jpg)
主体结构验收流程[共4页]

安全技术措施和安全施工措施的编制与执行
创建文明校园主持词范文(2篇)
最新醇基燃料MSDS危化品安全重点技术专项说明书
【最新教材】高中数学北师大版选修12课时作业:1.2.1 条件概率与独立事件 Word版含解析

最新人教版高中数学必修一测试(含详细答案)
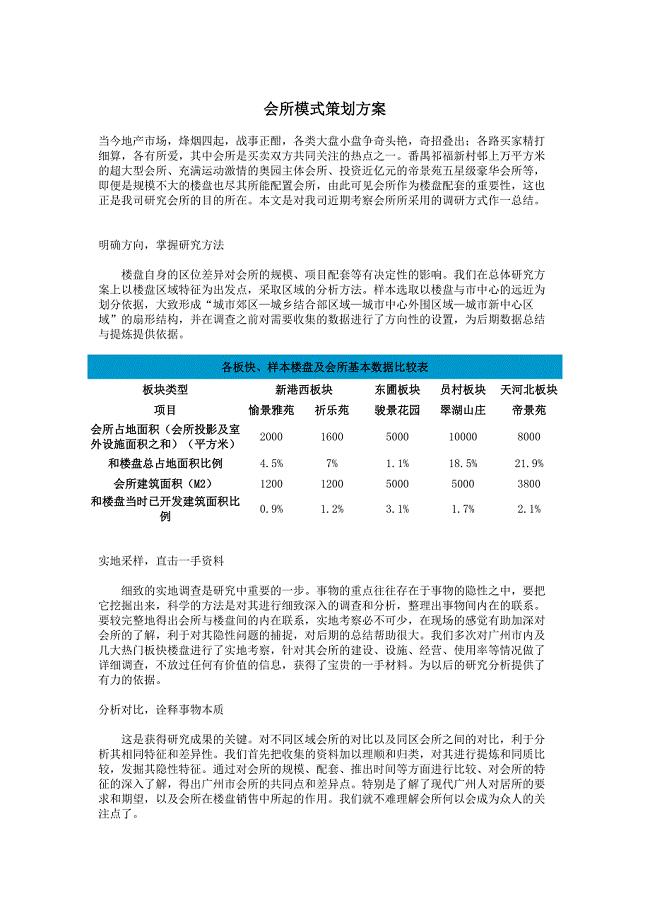
【管理精品】会所模式策划方案
2021年护理毕业生自我鉴定范文
2023银行贷款合同格式版(七篇).doc
乐山电子元器件项目招商引资方案(模板)

最新西安交大阳光中学高中数学学案选修124.1.1数的概念的扩充

质量文本

《检验检测机构资质认定能力评价通用要求》考试题
2023年暑期当服务员社会实践报告(KTV).doc
青海省海西蒙古族藏族自治州《综合知识和基本能力》事业单位考试
 HDMI基础知识
HDMI基础知识
2022-11-15 13页
深基坑应急预案
2023-10-11 19页
工贸企业安全标准化评定结果报告
2022-08-25 5页
工字钢护壁桩的施工方案
2022-10-12 12页
斜井施工组织方案
2022-08-16 22页
2019最新电大《行政组织学》期末网络考核试题及参考答案.doc
2023-12-02 10页
清包工家庭装修合同
2023-09-13 7页
道路施工交通分流方案(终版)
2023-09-23 20页
综合医院手术分类及批准权限规范方案
2023-12-20 40页
燃气公司市场拓展工作指导意见
2023-08-23 30页