
一阶倒立摆系统的双闭环模糊控制方案范文
17页
1、钦州学度系统仿真课程设计才艮告题目:一阶倒立摆系统的双闭环模糊控制方案专业、班级:自动本091班学生姓名:学 号: 0905404125指导教师:分 数:2012年 6 月 9 日摘要:2一、引言2二、设计目的3三、设计要求3四、设计原理3五、设计步骤31、 单级倒立摆系统的构成错误!未定义书签。2、单级倒立摆的数学模型43、模糊控制器的设计63.1单阶倒立摆模糊控制的基本思路63.2隶属函数的定义63.3模糊控制器规则73.4解模糊84、仿真实验84.1MATLAB模糊逻辑工具箱84.2系统数字仿真模型的建立115、基于MATLAB的数字仿真结果12六、结论13七、感想和建议13八、致谢14九、参考文献15摘要:通过对单阶倒立摆的双闭环的控制数学模型的分析,采用模糊控制理 论对倒立摆的控制系统进行计算机仿真。其中,内环控制倒立摆的角度,外环控 制倒立摆的位置。在Matlab环境下的仿真步骤包括:定义隶属函数及模糊控制 规则集,解模糊。结果表明,摆杆角度和小车位置的控制过程均具有良好的动态 性能和稳定性能。关键词:倒立摆;模糊逻辑控制;计算机仿真;MATLABAbstract: bas
2、ed on the ChanJie inverted pendulum double closed loop control mathematical model analysis, the fuzzy control theory of the inverted pendulum control system by computer simulation. Among them, the inner loop control the point of view of the inverted pendulum, outside loop control the position of the inverted pendulum. In the Matlab environment simulation steps include: definition membership function and fuzzy control rule sets, solution is fuzzy. The results show that, swinging rod Angle and the
3、 car position control process are good dynamic performance and stable performance.Keywords: inverted pendulum; Fuzzy logic control; The computer simulation; Matlab一、引言在人类自然科学的发展历史上,人们总是以追求事物的精确描述为目的来进 行研究,并取得了大量的成果。随着科学技术的进步,在社会生产和生活中存在 的大量的不确定性开始引起人们的注意。有关模糊不确定性的研究直到1965年, 美国的L.A.Zadeh教授首次提出模糊集合的概念之后得到广泛开展。“模糊”是与“精确”相对而言的概念,模糊性普遍存在于人类的思维和语 言交流中,是一种不确定性的表现。随机性则是客观存在的另一类不确定性,两 者虽然都是不确定性,单存在本质上的区别。模糊性主要是人对概念外延的主观 理解上的不确定性,而随机性则主要反映客观上的自然的不确定性,即对事件或 行为的发生与否的不确定性。一阶直线倒立摆系统是一个典型的“快速、多变量、非线性、自不稳定系统”,
4、将模糊控制方法应用于一阶倒立摆系统的控制问题,能够发挥模糊控制在非线性 系统控制、复杂对象系统控制方面的优势,简化设计,提高控制系统的鲁棒性。倒立摆系统是典型的多变量、非线性、强耦合和快速运动的自然不稳定系统。 故针对单级倒立摆系统,通过数学建模,采用模糊控制理论研究倒立摆控制系统 仿真控制问题。二、设计目的倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型 例子。设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引 入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统。三、设计要求倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有 大的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随 机扰动而保持稳定的位置。实验参数自己选定,但要合理符合实际情况,使用 模糊控制方式,并利用MATLAB进行仿真,并用simulink对相应的模块进行仿 真。四、设计原理倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂 直方向的角度,作为系统的两个输出量被反馈全控制计算机。计算机根据一定的 控制算法,计算出空置量,并转化为相应的电压
《一阶倒立摆系统的双闭环模糊控制方案范文》由会员cn****1分享,可在线阅读,更多相关《一阶倒立摆系统的双闭环模糊控制方案范文》请在金锄头文库上搜索。
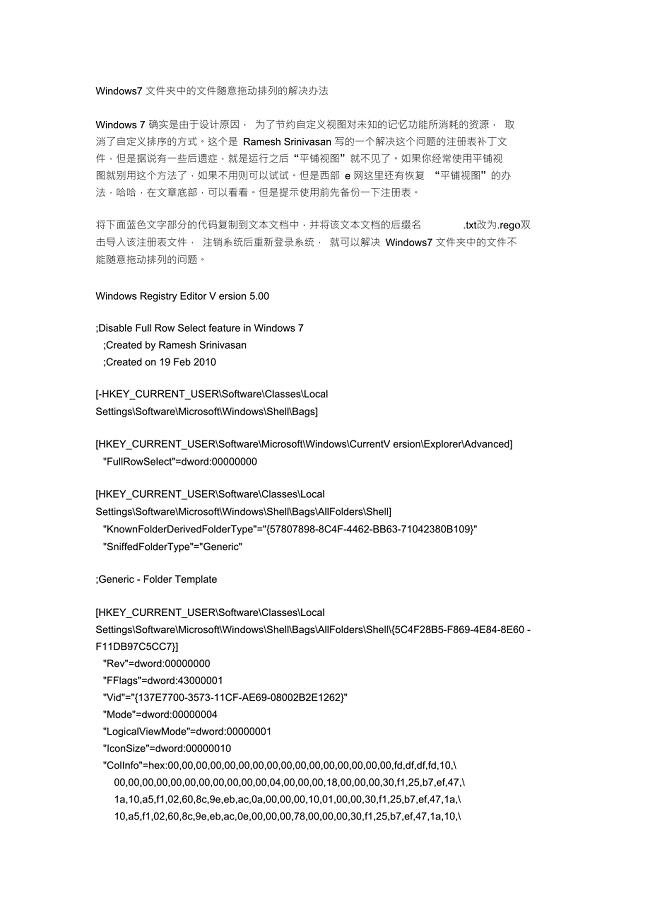
win7文件夹内文件随意拖动排列方法
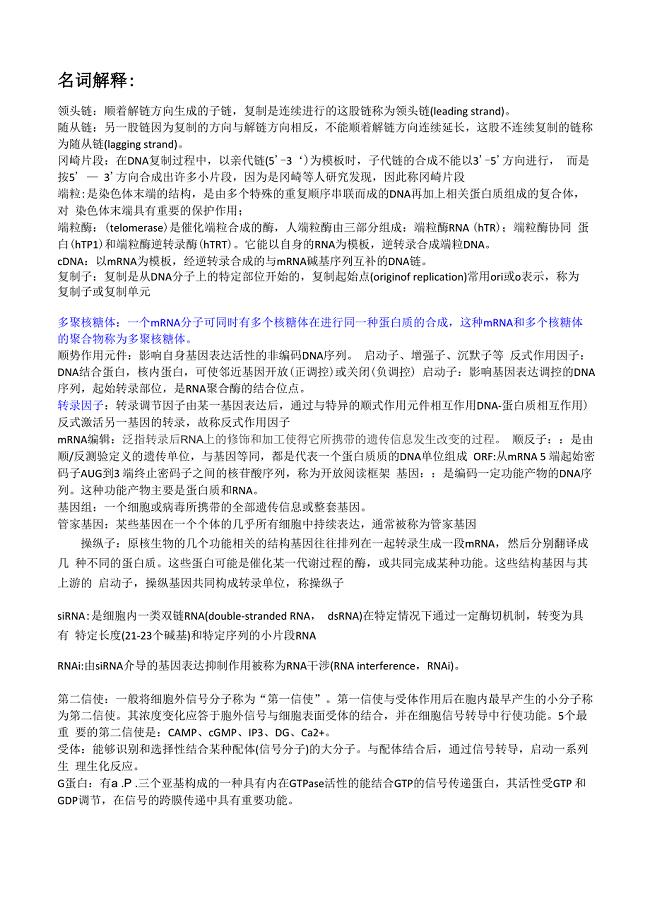
分生名词解释
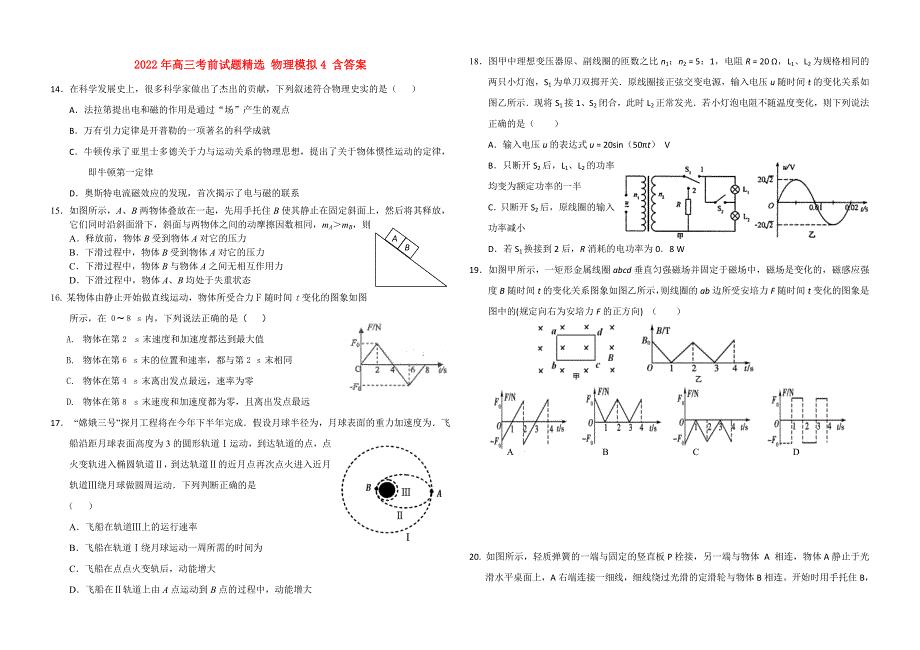
2022年高三考前试题精选 物理模拟4 含答案
档案数字化加工方案
天长市扩大内需项目策划书【模板范文】
上半年幼儿园园务工作计划范本(2篇).doc
建筑公司班前安全活动制度
酒类生产许可证实施细则
人行天桥车行高架桥绿化养护及配套设施维护项目
售前咨询技巧答案
2023企业财务个人年度工作总结(3篇).doc
线缆供货合同范文正式版
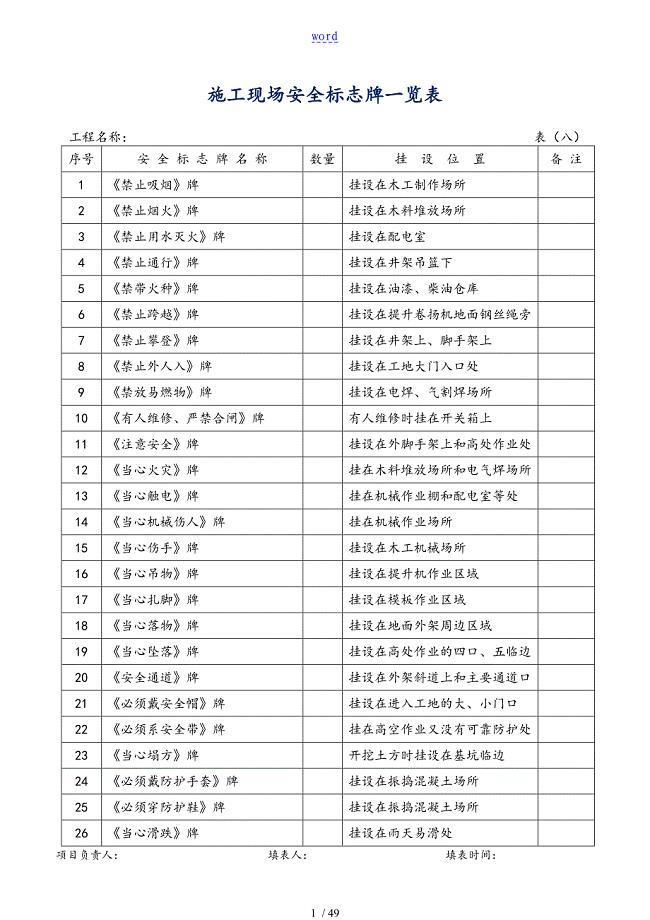
建筑安全系统内业全资料全套word表格
内蒙古鄂尔多斯市七年级生物下册4.1.3青春期导学案(原版)(新版)新人教版
车间生产统计个人年终工作总结.doc
10Q3培训心得
2023人事工作计划标准范文(八篇).doc
《窃读记》教学设计(6)
2022学生会成员总结
建设蚀刻设备生产线项目资金申请报告写作模板定制
 累积式教育法(137学习法)
累积式教育法(137学习法)
2022-11-06 2页
语言起源与人类进化
2023-07-20 4页
3D3S常见荷载施加方法有点荷载
2023-10-30 1页
t污泥板框脱水方案
2022-08-17 31页
计算能力调查报告
2022-12-02 6页
通信保障应急预案简本
2023-09-02 11页
退耕还林设计说明书
2023-12-19 8页
道路硬化工程项目关键施工技术工艺及工程项目实施的重点难点分析和解决方案
2022-12-09 6页
2010年回顾宣传片脚本 红风筝篇
2022-09-18 7页
1常用仪器 仪表的使用
2022-12-14 9页