
积分分离PID控制算法及继电法整定
8页
1、word软件设计报告-积分别离PID控制算法与继电法整定一、 设计要求 以中等纯度的精馏塔为研究对象,考虑到不等分子溢流的影响和非理想的汽液平衡,可以得到塔顶产品轻组分含量Y与回流量L的传递函数为: 1式控制要求:1、2、 采用继电法整定PID参数3、 整定效果验证:当被控过程参数时变时,如滞后时间由8 12,开环增益由3.4 6时,讨论PID控制的响应速度与鲁棒行问题,考察当系统参数发生改变时,上述PID参数是否选取适宜。二、 设计原理 PID控制根本原理 具有比例-积分-微分控制规律的控制器,称PID控制器。其运动方程为:2式 1普通PID控制根本原理 比例环节是按比例反响系统的偏差信号e(t),系统一旦出现了偏差,比例调节立即产生调节作用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例kp,使系统的稳定性下降,甚至造成系统的不稳定。要有效消除静差,需引入积分环节和微分环节。积分环节用于消除系统稳态误差,提高无差度。输出信号与偏差存在随时间的增长而增强,直到偏差消除,输出信号保持原输出值不变,故能消除静差。积分作用的强弱取决于积分时间常数Ti, Ti越小,积分作用就越
2、强。反之如此积分作用弱,但参加积分调节会使系统稳定性下降,动态过程变慢。而微分调节是指调节器的输出与偏差对时间的微分成比例,微分调节器在温度有变化“苗头时就有调节信号输出,变化速度越快、输出信号越强,故能加快调节速度,降低温度波动幅度,改善系统的动态性能。在微分时间Td选择适宜情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。 2积分别离PID控制根本原理 随着数字技术、计算机技术的开展,采样控制系统在工业控制中得到了广泛的应用。数字PID算法便成为一种最常用的控制算法。在普通的PID控制中,积分环节的引入是为了消除静差,提高控制精度。但系统在启动、完毕或大幅度调整设定时,系统输出大的偏差,造成积分积累,引起系统较大的超调,甚至引起较大的震荡,这在实际生产中是不允许的。积分别离控制根本原理是,当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度2-3。积分别离控制算法可表示为: 3式式中,T为采样时间,项为积分项的开关系数上式为认为设
《积分分离PID控制算法及继电法整定》由会员cl****1分享,可在线阅读,更多相关《积分分离PID控制算法及继电法整定》请在金锄头文库上搜索。
放弃申请预付款声明
通信咨询真题及答案详解
尾矿资源综合利用项目可行性研究报告-用于立项备案
2022年河长制工作履职情况报告
2023年建筑工程公司年终总结
2022三年级语文下册第八单元26方帽子店练习新人教版
机械设计总复习2013.
中级质量工程师课程讲义第19讲
孩子变得爱举手了
医学专业自荐信
社区服务心得体会模板(7篇)
基于Android的校园新闻app开发毕业设计
《草船借箭》教学反思
1122防洪堤工程汛期专项工程施工组织设计方案
售后服务人员管理工作年终总结(4篇).doc
西式面点师五级理论知识试卷(一)
攀枝花市关于成立废旧纺织品循环利用公司策划书
文明单位创立工作方案
庆元旦二年级作文
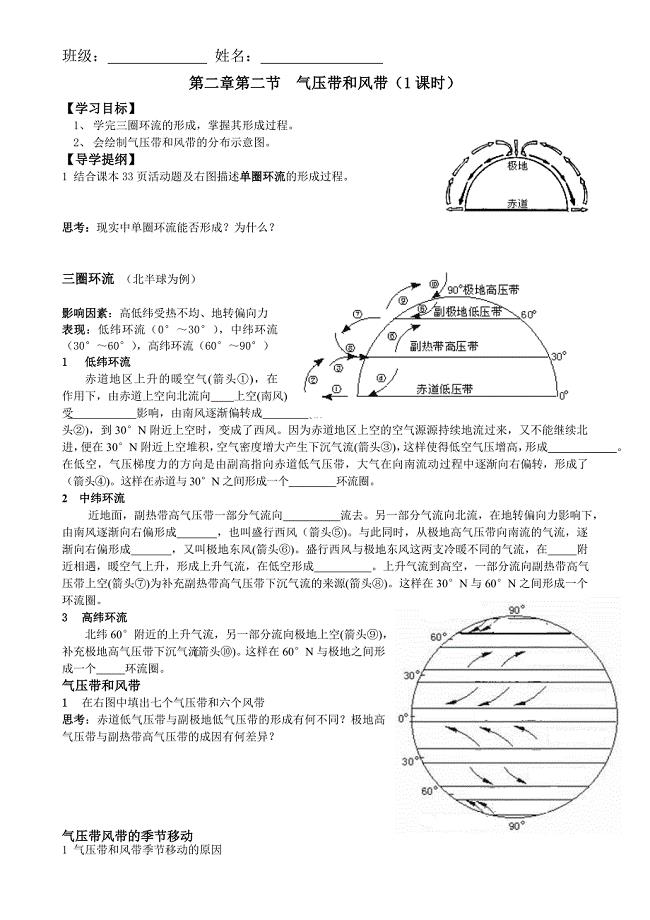
第二节气压带和风带1
 5G无线通信技术概念及相关应用
5G无线通信技术概念及相关应用
2023-11-12 12页
读书的好处英语作文(共6页)
2023-03-02 6页
学生请假离校参加艺考培训协议书(1)
2022-08-07 2页
无出轨离婚协议书样本(优质3篇)
2022-11-16 5页
有源钳位正激变化器的工作原理
2023-06-15 14页
全国法院被执行人信息网被执行人信息异议申请书
2023-07-09 1页
精品资料(2021-2022年收藏的)毕业实习报告(1)
2023-01-12 15页
噻吩安全周知卡
2022-10-28 1页
部编一年级语文上册第二单元备课计划(共2页)
2023-08-12 2页
英语教学工作计划
2024-01-24 3页