
基于ADAMS与MATLAB的Stewart次镜平台联合仿真
5页
1、基于 镜平台联合仿真摘 要:提高空间相机成像质量的有效方法。为验证确性、提高设计效率,本文基于口技术,建立了台机械与控制系统机电混合模型,进行了机电联合仿真研究。首先,对 镜平台进行了运动学理论分析,建立了运动学数学模型;然后,在将立了机电联合系统模型;最后,以典型的阶跃位姿轨迹信号,对真结果表明,真参数和数据为键词:镜;并联机构;运动学;动力学;虚拟样机;In to of of a a of of on s of of of of of of by it in of by a as of a of 言空间相机受发射冲击、振动及在轨温度环境变化、应力释放等因素影响,可能会引起主次镜相对位置的误差及次镜倾斜,造成相机的成像质量下降。为保证主次镜光路的精确重合与对准,需要对次镜的位置与姿态做实时调整。六自由度 联机构作为次镜调整机构,具有高精度、高刚度、高稳定性,误差小,摩擦小,动态性能好等优点 1但并联机构是一个多输入、多输出系统,杆间耦合性强,控制过程复杂。在制造 镜平台的实物之前,须对并联机构机械系统和控制系统进行仿真研究,为其结构优化、控制器设计、模拟运动提供理论依据和主要参数。传
2、统的机电系统设计是分别设计机械和控制系统,在物理样机测试时第一次将两个设计结果结合起来,容易发生机械和控制系统不匹配问题,设计修改量大,设计效率低。因此,急需一种从设计伊始就同时考虑机械、控制系统,将二者建立在同一仿真模型中进行机电联合仿真的设计方法。联合仿真就是不同的仿真程序在同一步长时刻下交换参数和数据,然后各自进行求解计算的方法。这种方法能够有效结合多种软件的优点,实现并联机构的设计要求,提高设计的效率和质量。以与间进行控制数据交换,本文通过块和 接口来实现镜平台的机电联合仿真。1 联机构运动学分析并联机构运动学分析是求解并联机构的输入与输出构件之间的位置、速度、加速度之间的关系。运动学分析是进行动力学分析、结构优化设计、控制策略研究的基础。论基础如图 1 所示,联机构结构由上下两个平台和 6 个并联的、可独立自由伸缩的杆件组成。六根支杆和平台之间通过虎克铰 球铰 接,通过控制六根支杆长度来实现动平台(上平台)的位姿调整。为了定量地表示动平台各处的坐标,在静平台的综合质心处建立惯性坐标系(静坐标系)坐标原点为 O,在上平台的综合质心处建立连体坐标系(动坐标系)标原点为 P,各坐标
《基于ADAMS与MATLAB的Stewart次镜平台联合仿真》由会员论****分享,可在线阅读,更多相关《基于ADAMS与MATLAB的Stewart次镜平台联合仿真》请在金锄头文库上搜索。
重症扩张型心肌病患者的心理护理干预

重影、诗意与信仰——从阿尔托残酷戏剧理论看《等待戈多》

政治经济学需要一场颠覆性革命

中药敷贴结合按摩疗法治疗肛肠病术后功能性便秘疗效观察
在孤独旅行中成长——读《十八岁出门远行》
幼儿教师职业压力与应对方式研究综述
原发性大隐静脉曲张中lncRNAs的差异表达

英语报刊选读教学的图式建构探析
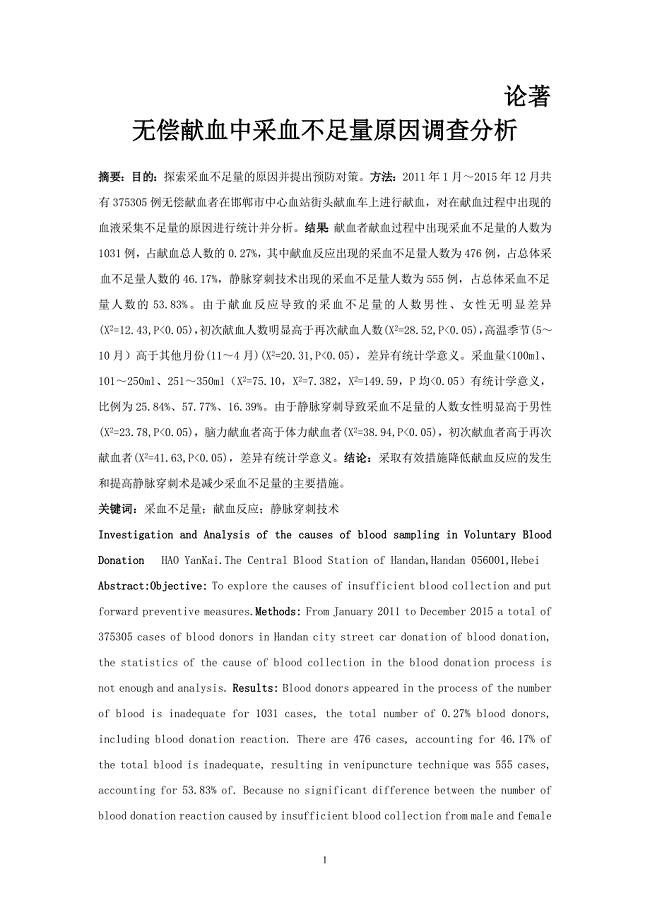
无偿献血中采血不足量原因调查分析1

我国个人所得税改革思路研究

渭南市政府出资产业投资基金调研报告

网络媒体在高校机关作风建设中功能的探究
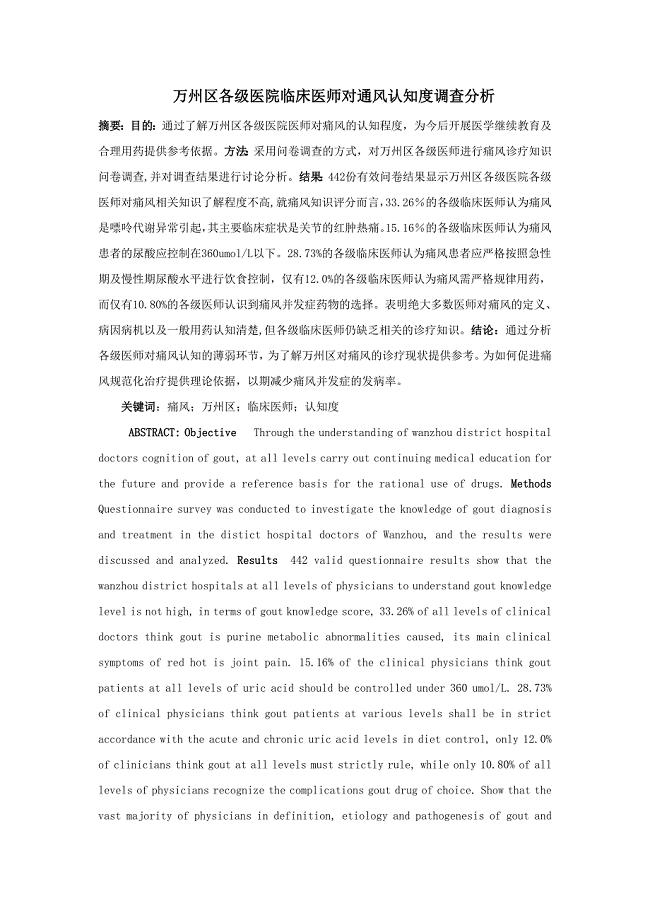
万州区各级医院临床医师对通风认知度调查分析

体育教育专业田径课中开设定向越野运动的可行性研究

提质增效 全方位建立地方金融风险防范墙
唐三藏面试

胎儿纤维连接蛋白对单双胎早产的预测价值的比较

四川省旅游服务贸易核心竞争力培育研究

顺应论视角下的韵语儿童文学翻译
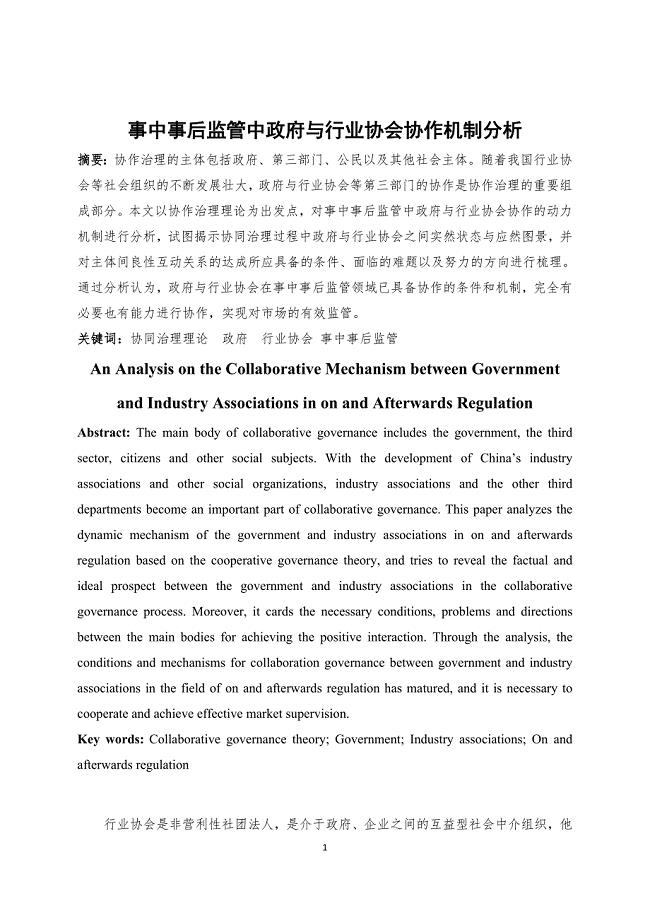
事中事后监管中政府与行业协会协作机制分析(终稿)
 自我意识诠.doc
自我意识诠.doc
2023-06-19 16页
经济金融财务贸易词库:经营安全率及量本利分析图
2023-02-03 6页
人力优化方案(裁员方案).doc
2022-12-30 5页
助动词do和does专题练习(附答案)
2022-11-25 7页
铁路防断工作总结
2023-08-26 6页
高中生物 第5章《基因突变及其他变异》测试题B卷(提高篇)新人教版必修2.doc
2023-07-18 13页
农机安全检查工作方案
2022-08-30 6页
学习焦裕禄精神活动的方案.doc
2023-08-01 4页
珍藏版 清代皇帝《宝薮》
2023-11-06 48页
英语专业毕业论文(1).doc
2022-09-01 11页