
智能救援车
14页
1、G 甲 智能救援车青岛理工大学 李西峰 孙强 王魁专家点评:该设计以凌阳公司 片机为控制核心,较好地实现了智能车的智能控制过程,包括智能避障、路面寻线、金属检测、金属拾起及放下、声光报警、分段行进时间显示等功能。在智能避障中,采用红外传感器完成避障工作并实现在障碍物迷宫里自由行走。使用光电传感器实现在弧形轨迹上寻迹前进。金属探测中,使用金属接近传感器检测铁片,并用继电器拾起铁片,再断电时放下铁片。该设计通过 制直流电动机来为小车提供动力,以实现小车的前进,转弯,倒车等动作。在测试中,该设计的作品顺利通过规定的各项基本测试以及发挥部分要求的测试内容。各项测试指标均达优秀指标。青岛理工大学 张天开教授2008/9/24摘 要:本设计中的智能救援车以凌阳公司 片机为控制核心,实现智能车的智能控制,包括智能避障、路面寻线、金属检测、金属拾起及放下、声光报警、分段行进时间显示等功能。在智能避障中,采用红外传感器完成避障工作并实现在障碍物迷宫里自由行走。使用光电传感器实现在弧形轨迹上寻迹前进。金属探测中,使用金属接近传感器检测铁片,并用继电器拾起铁片,在断电时放下铁片。在声光报警方面,采用了凌阳的
2、语音功能进行不同情况的语音报警并采用发光二极管不间断的发光报警,同时采用 1602 液晶显示时间,通过 制直流电动机来为小车提供动力,以实现小车的前进,转弯,倒车等动作。关键词 :金属探测;红外避障;路线寻迹;语音报警on up of In is to to in is in to on In is to of by of it up In of it ED s C WM 系统总体方案与论证由题目分析可得:本设计需要一个由控制器模块、寻线前进模块、红外避障模块、电机驱动模块、金属检测模块、语音播报模块、铁片处理模块、电源模块等几部分组成的系统来实现题目要求。它们的关系请见附件一(图 1) 。为实现本系统的功能,下面分别对几种不同的设计方案进行了具体的分析论证。方案一:使用超声波进行避障。把超声波模块装在舵机上,通过舵机的转向,来进行多个方向的避障,在行进过程中,舵机不断进行多个方向的旋转,对前方障碍物进行检测,相应调整小车的位置和检测是否有通路,若有通路,通过舵机精确拐弯 90 度,调整舵机方向至小车正前方,从超声波模块传回来的信号小于某一设定值,进行相应方向转弯,重复前边的行进过程,
3、直到从超声波模块传回来的信号几乎为零,说明出了 B 口。停车 5 秒钟,小车向前稍微前进,寻找黑线入口,在弧形引导轨迹上前进,通过光电传感器传回的信息,判断小车是否偏离轨迹,再作出必要的处理,在轨迹上行走中,打开金属传感器,当金属传感器检测到金属时,停车 3 秒,并进行报警,然后对继电器操作,拾起铁片,继续寻迹前进,当发现前面没黑线时,放下铁片,并声光报警,即救援结束。显示各段所走时间。方案二:在小车左、前、右各安装一个红外传感器,对红外传感器传送的信号进行检测分析,通过对该变化的电信号进行必要的操作,使小车保持在路的中心线前进。并打开前面的红外传感器,时时检测,防止小车碰到前边的墙壁。行进过程中控制器接收到某侧红外传感器连续传回来的信号变化很大,说明小车前方的此侧有可以拐弯的通路,通过单片机控制电动机向此方向拐弯大约 90 度,若前方红外传感器传回来的信号小于某一设定值,继续进行本方向拐弯。并对此进行计数。反复进行上述动作。若计数值等于 2,说明小车完成第二个弯。小车继续避障前进,控制器接收到右侧红外传感器连续传回来的信号变化很大,进行右拐,保持前进,若两侧红外传感器传回值同时减小,
《智能救援车》由会员工****分享,可在线阅读,更多相关《智能救援车》请在金锄头文库上搜索。

电源安全生产管理制度(新编版).docx
财务报表分析作业二答题卷---资产运用效率分析.doc

2023年公路建设公司职工个人工作总结范文.doc

2022年苏教版六年级科学上册期中考试及答案【学生专用】.doc
社会实践总结报告范本(4篇).doc
班会课教案设计.doc
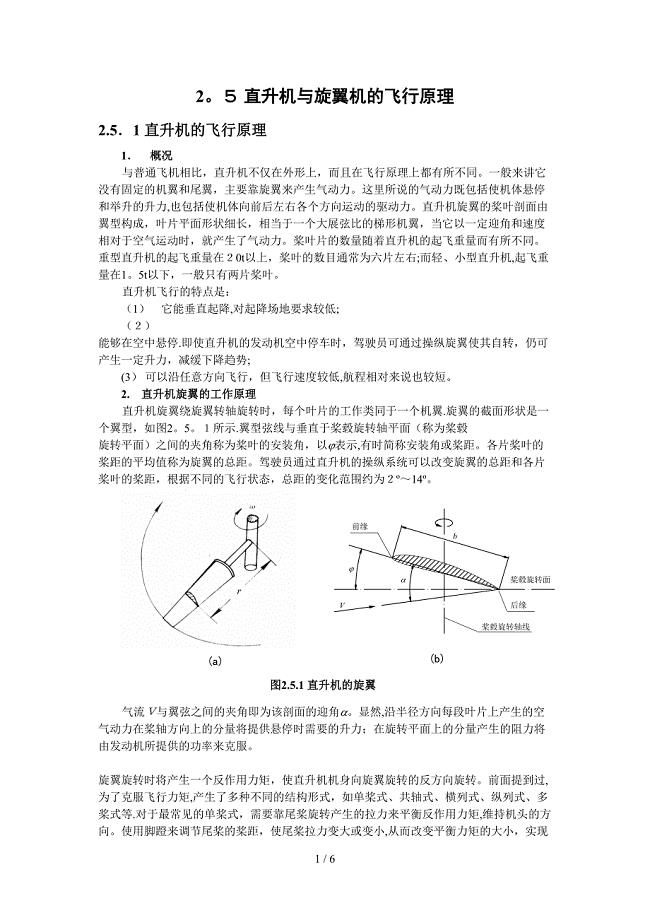
直升机飞行原理

12秋学前教育班2012——2013第二学期班主任工作总结.doc
塔吊基础监理细则
成人高考艺术概论单选练习及答案1.docx

慢性子不易老

谈电网建设项目档案管理方法.doc
小学五年级语文上册期中考试卷(完整版).doc

酒桌上的敬酒词.doc

新人教部编版四年级语文上册期中测试卷加答案.doc
广州旅游策划案.doc

关键工序及特殊过程的施工方案
人教a版数学【选修1-1】作业:模块综合检测(a)(含答案).doc

办公室2023年行政后勤管理工作总结(范文).doc
电子标签系统解决方案样本.doc
 git相关配置和操作
git相关配置和操作
2022-08-23 3页
虚拟机相关配置
2022-08-23 2页
MPPT控制器
2021-04-14 9页
利用STC89C52RC的水环境监测系统的设计与实现
2021-02-03 37页
超声多向障碍物探测系统
2021-02-03 37页
利用STM32F103进行癫痫病人人体参数采集系统设计
2021-02-03 39页
51单片机智能计算器报告
2021-02-03 14页
单片机小闹钟
2021-02-03 39页
制导武器的分布式半实物仿真系统研究
2020-09-25 1页
RTX与反射内存
2020-09-25 2页