
毕业设计(论文)机器人视觉伺服控制中的目标识别.
66页
1、毕 业 设 计(论文)专 业: 学 号: 学生姓名: 所属学院: 指导教师: 2010年 6月中国民航大学本科生毕业设计(论文)机器人视觉伺服控制中的目标识别Target identification of vision robot servo-control 专 业:学生姓名: 学 号:学 院:指导教师: 2010 年 6月创见性声明本人声明:所呈交的毕业论文是本人在指导教师的指导下进行的工作和取得的成果,论文中所引用的他人已经发表或撰写过的研究成果,均加以特别标注并在此表示致谢。与我一同工作的同志对本论文所做的任何贡献也已在论文中作了明确的说明并表示谢意。毕业论文作者签名: 签字日期: 年 月 日本科毕业设计(论文)版权使用授权书本毕业设计(论文)作者完全了解中国民航大学有关保留、使用毕业设计(论文)的规定。特授权中国民航大学可以将毕业设计(论文)的全部或部分内容编入有关数据库进行检索,并采用影印、缩印或扫描等复制手段保存、汇编以供查阅和借阅。同意学校向国家有关部门或机构送交毕业设计(论文)的复印件和磁盘。(保密的毕业论文在解密后适用本授权说明)毕业论文作者签名: 指导教师签名:签
2、字日期: 年 月 日 签字日期: 年 月 日摘 要为了实现四自由度机器人GRB-400机器人的准确抓取控制,本文进行基于视觉反馈的机器人伺服控制系统研究。首先进行了视觉图像处理研究,由机器人平台正上方的摄像头捕获图像,采用中值滤波的方法进行图像滤波,直方图方法对图像进行增强,canny法对图像边缘检测和二值法图像分割,完成图像的预处理。其次对处理后的图像进行目标识别,提取图像特征,采用模板匹配的方法识别出目标工件。最后识别出的工件进行标定,图像中目标工件的位置决定了它在空间的位置。而对于分割后的二值图像,目标工件的中心位置与目标工件的质心相同,根据坐标计算公式求得质心位置坐标和角度值。由摄像头的线性模型标定目标工件的三维位姿,将结果反馈给执行模块,从而驱动关节正确运动,执行抓取工件操作。实验结果表明,所选择的算法简单实用,达到了预期的效果。关键词:工业机器人 图像处理 目标识别 摄像头标定ABSTRACT In order to realize the accurate capture control of four degrees-of-freedom robot GRB-400 ,
3、 this article carries on the servocontrol research of robot based on the visual feedback. First of all, the camera at the top of robot is used to capture images for the research of visual image processing,.With the method of median filtering, image filtering, image enhancement histogram method, canny edge detection method and the binary image segmentation,it complete the image preprocessing. Second, recognize the processed image ,find out image feature extraction. Use matching method to identify
4、 target workpiece. Finally ,distinguishde the work piece is carried on the demarcation,. The goal work piece positionin the image has decided it in the spatial position.But the division two value image, the goal work pieces central place and the goal work pieces center of mass are the same, obtains the center of mass position data and the angle value according to the coordinate formula.Through cameras linear model spotting work piece three dimensional pose, result feedback for executive module,
《毕业设计(论文)机器人视觉伺服控制中的目标识别.》由会员汽***分享,可在线阅读,更多相关《毕业设计(论文)机器人视觉伺服控制中的目标识别.》请在金锄头文库上搜索。
小学五年级语文(人教版)下册期末试卷及答案
东江大桥盖梁施工方案2011.05.5
平面设计师工作总结报告(3篇).doc

检讨书违规违纪.docx
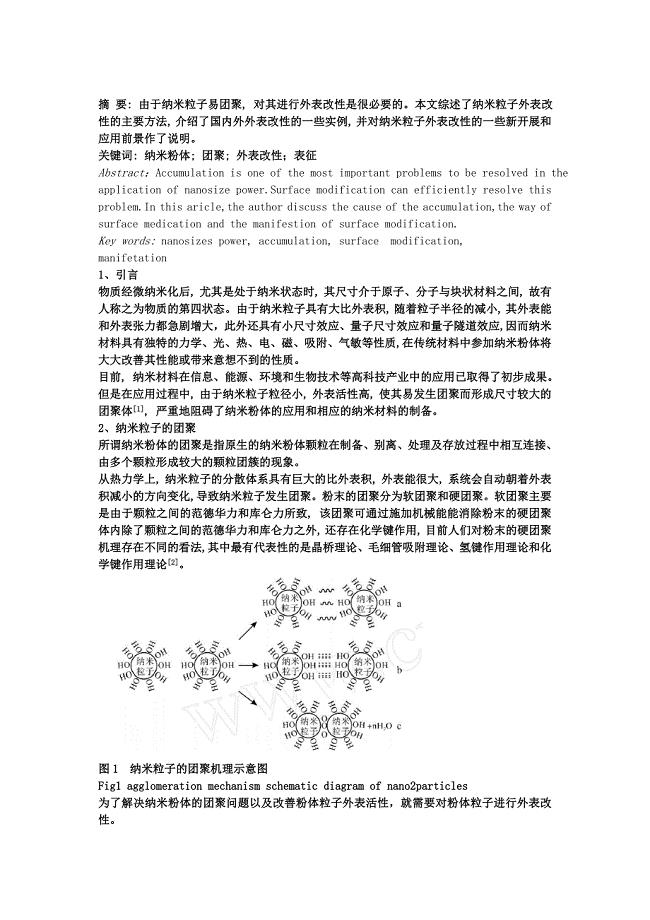
2023年无机纳米粉体表面改性研究进展.doc
二手房交易协议书参考模板(3篇).doc

咖啡促销策划方案
下社区工作总结

创建州级文明县城倡议书

2023年衡阳市初业水平考试语文试卷初中语文.docx
2023年黔东南州非课改区)初中毕业升学统一考试初中语文.docx
八堡中学义务教育均衡发展材料

文旅商综合体项目商业计划书写作模板
听杨家琪老师的《花瓣飘香》有感.doc
乡镇##年上半年财政工作总结.docx
2023年管理申请书4篇.docx
小学一年级下学期语文期末试卷含答案(DOC 4页)
上海市宝山区2016届高三上学期期末教学质量诊断(一模)英语试题.doc
报刊亭租赁协议简易样本(2篇).doc

医药连锁公司门店营运手册(DOC 80页)
 毕业设计(论文)麦克风外壳注塑模具设计含全套cad设计图纸
毕业设计(论文)麦克风外壳注塑模具设计含全套cad设计图纸
2023-05-16 41页
大型污水处理厂总体施工组织设计
2022-11-17 154页
南阳关于成立精密切削件公司可行性报告(模板范本)
2023-09-10 119页
2023年《秦王扫六合》教学设计
2023-05-23 9页
天正建筑命令大全整理篇
2023-01-23 7页
假如给我三天光明学生读书笔记
2023-03-30 9页
雪堰佳源中心广场房屋质量问题欺诈消费者有图有真相
2023-05-06 6页
毕业设计(论文)基于android图书管理系统开发
2023-10-22 72页
泰安氰酸酯树脂项目投资计划书_模板
2022-08-30 111页
2023年年关于区委履行党风廉政建设主体责任报告范文
2022-10-25 13页