
搬运用液压机械手控制系统设计
59页
1、 本科毕业设计(论文)题 目搬运用液压机械手控制系统设计学生姓名 学 号 院(系)机电工程学院专 业 指导教师 时 间 摘要在工业生产过程中人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危及生命。自从机械手问世以来,相应的各种难题迎刃而解。本文以三自由度搬运用液压机械手为研究对象,该机械手能在空间抓、放、搬运物体,动作灵活,适用于生产线中、小型批量自动化生产。机械手的全部动作由液压缸和液压马达驱动,液压缸和液压马达由电磁阀控制,电磁阀由PLC程序控制。论文的主要工作如下:设计了机械手的液压系统图,选取了相应的液压元器件,给出了PLC的控制方案,设计了PLC接线图、控制面板。并以此设计了PLC控制程序,此程序可实现机械手的上升/下降、伸出/缩回、抓取/放松和左转/右转等功能。关键词:三自由度、机械手、液压、PLCAbstractIn the process of industrial production, people are often subjected to high temperature, corrosion and toxic gases and
2、 other factors, increasing the labor intensity of workers, and even endanger life. Since the advent of manipulator, smoothly done or easily solved the corresponding problems.In this paper, three degrees of freedom to move the use of hydraulic manipulator as the research object, the robot hand in space to grasp, put, moving objects, action flexible, applicable to the production line, small batch automated production. The whole movement of the manipulator is driven by the hydraulic cylinder and th
3、e hydraulic motor, the hydraulic cylinder and the hydraulic motor are controlled by the electromagnetic valve, and the electromagnetic valve is controlled by the PLC program.The main work of this paper are as follows: design the manipulator of the hydraulic system diagram, select the corresponding hydraulic components, the PLC control scheme is proposed, and thus the design of the PLC control program, this program can realize the rise of manipulator / down, stretched out / retracted, crawl / rel
《搬运用液压机械手控制系统设计》由会员ni****g分享,可在线阅读,更多相关《搬运用液压机械手控制系统设计》请在金锄头文库上搜索。
2023年地方税务局收入工作总结.docx
英语人教版必修3练习:Unit 3 Period 2 Learning about Language Word版含解析精修版
献爱心捐款募捐倡议书.doc
SpotDictation笔记的方法
2022关于描写景作文3篇
国家公务员制度及答案同名
某公司网络系统集成方案设计
司法行政全年工作要点.docx
2023年国土局纪检监察工作要点.docx
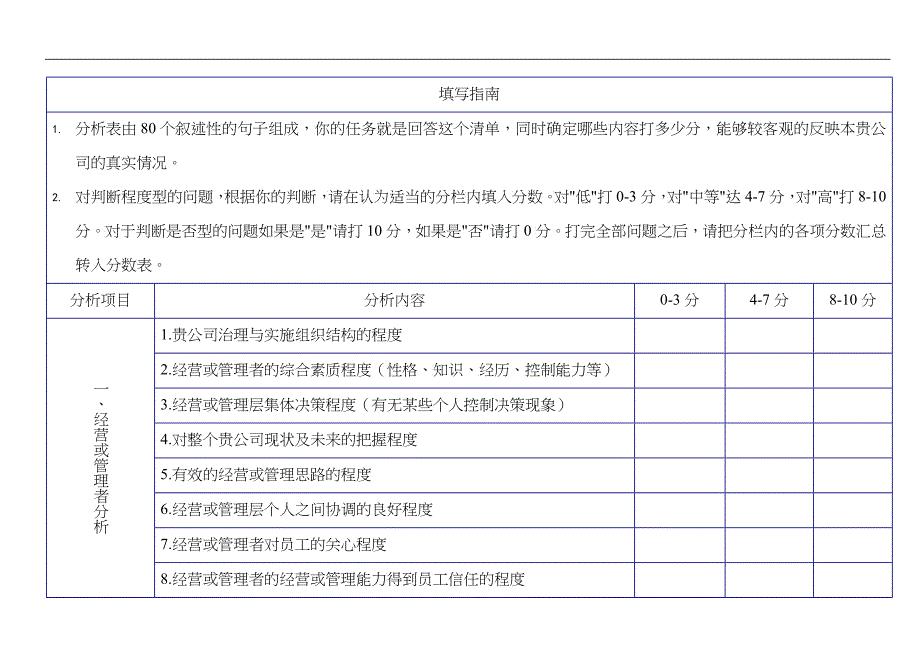
咨询工具之客户体质调查
学习经济法的体会
2023年石油分公司质量月活动总结范文.doc
酒店电脑部的办公室工作总结范文.doc
2022星巴克圣诞节营销活动方案
精选物流业年终工作总结范文合集6篇
包村干部个人工作总结.docx
五年级列方程解决问题教学设计.doc

2023年论我国古建筑征收程序的完善.docx
包装bbet
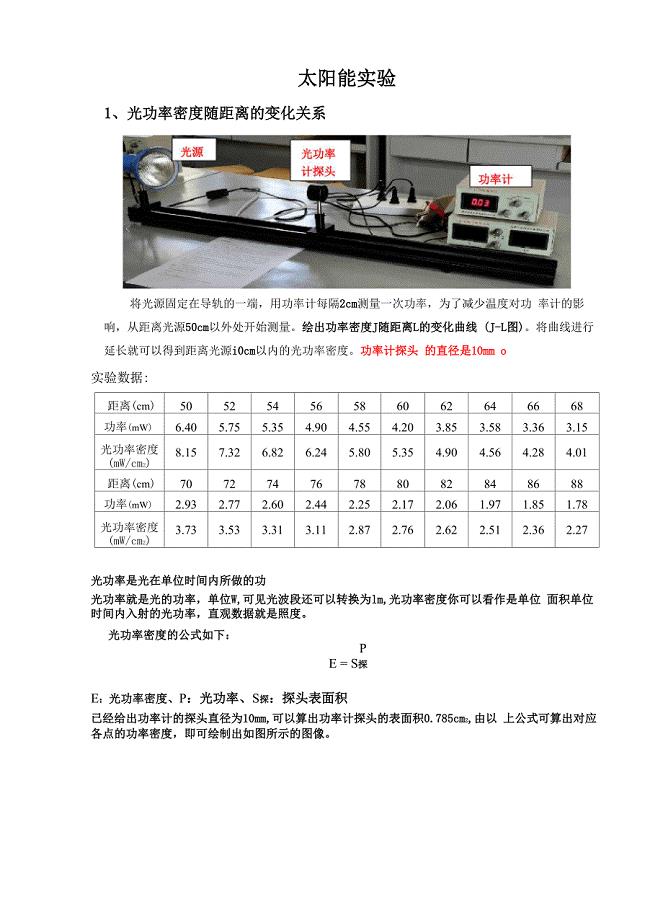
太阳能实验
 数理统计课后题答案完整版(汪荣鑫)
数理统计课后题答案完整版(汪荣鑫)
2023-03-12 28页
党课讲稿:强化政治引领 创建模范机关
2023-08-22 15页
电大计算机应用基础(本)实训3学习报告
2022-11-08 4页
商场超市新冠疫情期间防控奖惩制度
2023-03-20 6页
安全管理责任任命书和责任架构图
2024-03-14 181页
QTZ80使用说明书(重工5613).doc
2023-10-31 83页
部编版道德与法治三年级下册请到我的家乡来第一课时教案
2023-10-18 3页
C语言程序设计实验报告.doc
2024-03-17 18页
演唱会人员分工.doc
2023-06-09 4页
半导体物理(刘恩科)--详细归纳总结
2023-03-26 23页