
(精品)道路工程测量
9页
1、道路工程测量一、概述:道路工程在勘测设计、施工建造和运营管理各阶段中所进行的测量工作总称为路线测量。道路工程测量的主要任务包括以下几方面:(1) 控制测量:根据道路工程的需要,进行平面控制测量和高程控制测量。(2) 地形图测绘:根据设计需要,实地测量道路附近的带状地形图。(3) 中线测量:按照设计要求将道路位置测设与实地。(4) 纵、横断面图测绘:测定道路中心线方向和垂直于中心线方向的地面高低起伏情况,并绘制纵、横断面图。(5) 施工测量:按照设计要求和施工进度及时放样各种桩点作为施工依据。此外,有些道路工程还需要进行竣工测量、变形检测等。二、初测阶段的测量工作:道路初测中的测量工作主要包括:选点插旗、导线控制测量、高程控制测量、带状地形图测绘。1、 插旗选点:根据方案研究阶段在已有地形图上规划的道路位置,结合实地情况,选择交点和转点的位置并插旗,标出道路走向的大概位置,为导线测量和各专业调查指出行进方向。2、导线控制测量:导线控制测量是测绘道路带状地形图和定线、放线的基础,导线应全线贯通。采用全站仪或光电测距仪观测导线边长时,导线点间距一般为1km,但应在不长于500m处设置加点。采
2、用光电测距仪传递高程时,导线边长宜在200600m之间。由于导线延伸很长,为了检核导线的精度并统一坐标,必须设法与国家平面控制点或GPS点进行联测。随着测量仪器设备的发展,导线测量越来越多的使用GPS和全站仪配合施测。从起点开始沿道路方向直至终点,每隔5km左右布设GPS对点(每对GPS点间距300400m),在GPS对点之间按规范要求加密导线点。用全站仪测量相邻导线点间的变长和角度,之后使用专业测量软件进行导线精度校核及成果计算,最终获得各导线点的坐标。导线的观测导线的观测包括转折角的观测和导线边的观测及导线点高程测量。转折角的观测转折角的观测一般采用测回法进行。在进行国家等级转折角观测时,应以奇数测回和偶数测回分别观测导线前进方向的左角和右角;在进行一、二级和三级导线转折角观测时,一般应观测前进方向的左角。对于闭合导线,若按逆时针方向进行观测,则观测的导线角既是闭合多边形的内角,又是导线前进方向的左角。对于支导线,应按导线前进方向的左角和右角,以增加检核条件。导线边长观测导线边长可以采用电磁波测距仪测量,也可以采用全站仪在测取导线角的同时测取导线边的边长。导线边长应采用对向观测,以
3、增加检核条件。导线点的高程测量导线点的高程测量可采用水准测量或三角高程测量进行。导线测量近似平差计算导线测量的目的是获得各导线点的平面直角坐标。计算的起算数据是已知点坐标、已知坐标方位角,观测数据为观测角值和观测边长。导线平差的基本思路是将角度误差和边长误差分别进行平差处理,先进行角度闭合差的分配,在此基础上再进行坐标闭合差的分配,通过调整坐标闭合差,已达到处理角度的剩余误差和边长误差的目的。在进行导线测量平差计算之前,首先要按照规范要求对外业观测成果进行检查和验算,确保观测成果无误并符合限差要求,然后对边长进行加常数改正、乘常数改正、气象改正和倾斜改正,对角度值和边长进行归心改正(有偏心测量时),以消除系统误差的影响。(1)角度闭合差的计算及坐标方位角的推算两端与国家控制点联测,其方位角闭合差为:式中:根据导线转折角推算出的导线终止边坐标方位角; ,导线起始边和终止边的坐标方位角; 导线转折角(右角); n导线观测角的个数;由于各转折角都是按等精度观测的,说以坐标方位角闭合差可平均分配到每个角度上,即每个角加上相应的改正数,其改正数为:各导线的坐标方位角计算公式如下:(2) 坐标增量
《(精品)道路工程测量》由会员鲁**分享,可在线阅读,更多相关《(精品)道路工程测量》请在金锄头文库上搜索。
泰安化学制剂技术应用项目商业计划书【范文模板】
大学周记集锦3篇
我的大学新生活
2022小学教学工作总结4篇(精编)

大班美术兴趣班工作计划
家政服务物业合作协议 (1)
少先队工作计划_5.doc
地产有限公司法律尽职详细调查汇总报告初稿
幼儿园儿歌教案送别
寂静的春天大学读书笔记1800字.doc
区域竞聘演讲稿9篇
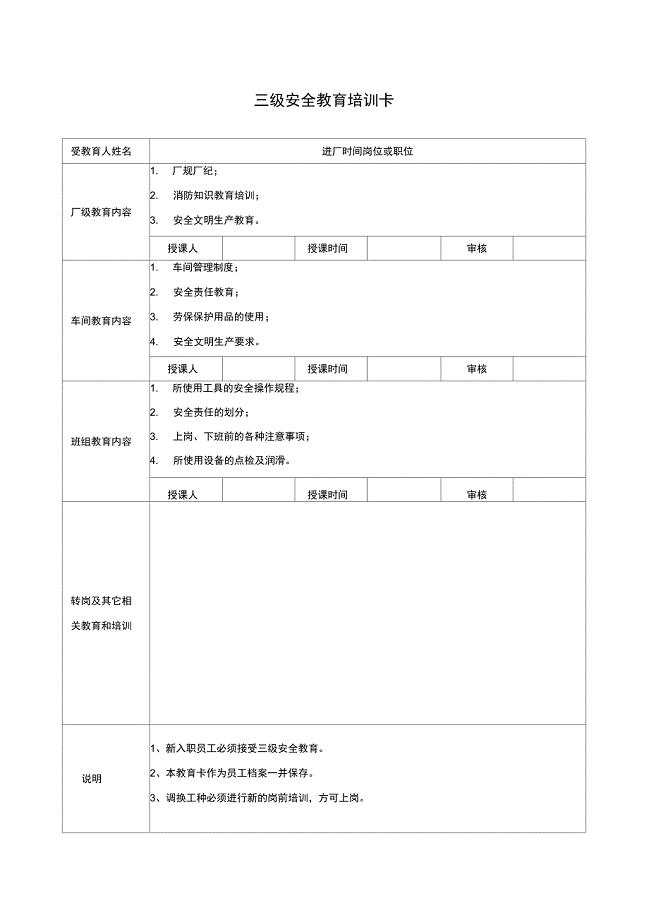
三级安全教育培训卡
宝宝吃奶量
概率论及数理统计概率问题
最新公路整车货物运输
“and、with”与“和、跟、同、与”英汉对译分析
万和五金制品厂员工合同Word版
2014年高考语文试题汇编病句答案
建材购销合同律师版(5篇).doc
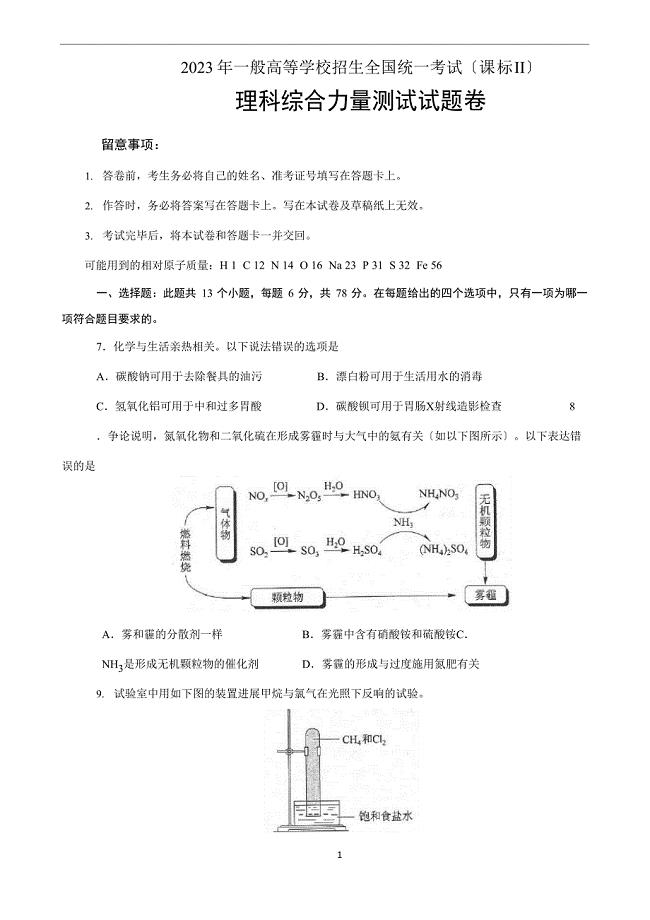
2023年新课标全国II卷理综化学试题及答案
 七年级英语上册Unit2IdlikesomenoodlesSectionB3aSelfCheck学案无答案鲁教版五四制
七年级英语上册Unit2IdlikesomenoodlesSectionB3aSelfCheck学案无答案鲁教版五四制
2023-01-06 2页
九龙山葡萄酒庄建设项目可行性研究报告书
2022-11-19 18页
新人教版一年级数学下册复习知识要点1
2022-09-15 30页
牛马文献综述信息化教学模式与传统教学模式的比较
2023-03-22 25页
190ka大型预焙槽技术参数优化研究技术之可行性研究报告书
2024-03-05 34页
材料科学基础扩散习题解答
2023-10-25 4页
消化科抗生素使用规范标准
2024-01-31 17页
行风评议心得体会
2023-05-17 4页
和我一起品咖啡——McAfee 8.8 规则设置(1)
2023-08-20 14页
l防撞护栏施工总结
2022-12-28 12页