
毕业设计(论文)-自动墙壁清洗机设计
27页
1、自动墙壁清洗机设计摘 要:近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文的任务就是设计一种能够在壁面上吸附行走的清洗机器人。在简单介绍清洗机器人的国内外研究现状的基础上,基于二维软件CAD对四轮式风压吸附清洗机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。设计的清洗机器人采用四轮式小车形状结构,结构简单;采用风压吸附方式,利用螺旋桨对空气的压缩所产生的压力将机器人压在物体表面,避免了清洗机器人对壁面的局限,降低了控制难度;清洗机主要由伺服悬吊系统、清洗主机和由计算机控制系统组成;采用无人化清洗,自动清洗,自动供水,自动供清洗液,单片机系统控制,操作人员只需通过键盘即可操纵清洗机工作,而且在清洗过程中,清洗机能够自动进行边缘识别,可根据建筑楼层的具体情况选择为纵洗或横洗;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用直齿圆柱齿
2、轮传动装置作为减速器;采用楼顶供电;机器人可以在水平面或者垂直表面直线行走。本机的清洗效率较高,清洗效果良好。关键字:清洗机器人;风压吸附;齿轮机构;刷洗全套图纸加扣 3012250582Design of Automatic Wall Cleaning MachineAbstract:In recent years, with the development of society, more and more floors, with glass curtain wall building more and more to avoid cleaning a very important issue, most of the traditional way of artificial, or a cable from the top of the building will be used under the robotic crane, low efficiency, high-risk, then cleaned with a wall-climbing robot came in
3、to being, this task is to design a walk on the adsorption to the wall climbing robot for cleaning. This paper briefly wall-climbing robot based on the research status, based on 2D software, CAD, four-wheel vacuum on wall-climbing robot body bodies were designed, carried out on some key satisfied with the design calculation and checking terms, focusing on the mobile climbing robot structure, adsorption structure and drive system design and calculation. This designed wall-climbing robot car with f
4、our-wheel-type shape of the structure, simple structure;By pressure adsorption,robot using the pressure generated by the propeller on the compressed air pressure in the surface,avoiding the clear limitations of the robot on the wall,reducing the difficulty of control;Washing machine is suspended by a servo system, cleaning host and consists of computer control system;The cleaning of the unmanned, automatic cleaning, automatic water supply for automatic washing liquid, single chip control system,
《毕业设计(论文)-自动墙壁清洗机设计》由会员pu****.1分享,可在线阅读,更多相关《毕业设计(论文)-自动墙壁清洗机设计》请在金锄头文库上搜索。
北师大版数学四年级下册期中试卷

车辆安全知识
民族大学科研项目及经费管理办法
工作总结中存在的不足
关于临时雇佣合同合集9篇
初中简爱读书笔记范文3篇简爱读书笔记左右初中
国家统计局太和调查队辅助调查员招考聘用笔试参考题库+答案解析
10月美术教师工作总结
融资公司工作总结
档案依申请提供利用的涵义及其法律思考
2023年软件工程师试用期转正工作总结范文
沙葱项目商业计划书写作模板
工程公司机构设置及岗位职责
股份认购协议书范例
车间组长季度工作总结
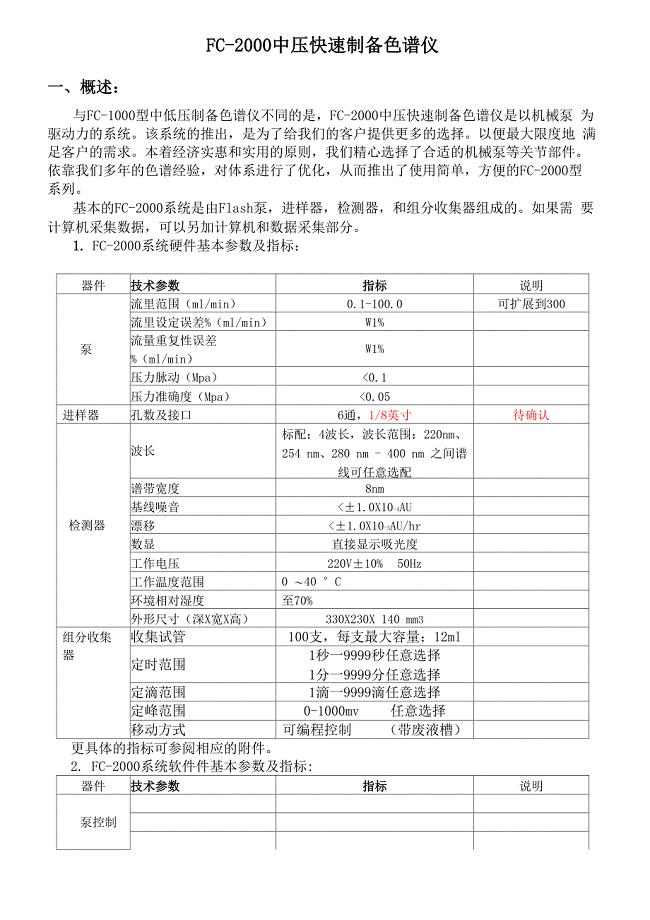
中低压快速制备色谱仪说明书200910
中班美术教案及教学反思大白菜
【新编】护士述职集锦9篇
高校辅导员年度个人工作总结范文(三篇).doc
教育工作自评报告
 毕业设计(论文)-谷物干燥机设计及制作
毕业设计(论文)-谷物干燥机设计及制作
2024-01-10 24页
中成药临床应用指导原则(正式版)
2023-02-18 22页
机械制造技术课程设计-星轮加工工艺及钻3-φ4孔夹具设计
2023-04-20 19页
毕业设计(论文)-基于Solidworks对带旋转电梯的水处理装置设计(全套图纸三维)
2023-07-14 24页
CA6140车床拨叉831006 加工工艺及铣16槽夹具说明书
2023-01-22 9页
生物质挤出成型机设计
2023-05-23 31页
基于VaR模型的福建省经济增长与金融发展关系实证研究金融学专业 开题报告
2023-03-18 8页
轻型车膜片弹簧离合器设计(下载送CAD图纸)
2023-10-26 57页
供配电课程设计-某单位小高层住宅楼供电照明设计
2023-01-28 18页
借鉴与自省——油画语言民族化的演变与当代特性
2023-11-01 10页