
abb机器人操作培训(s4c_irb)_说明书_完整版
50页
1、 S4C IRB 基本操作培训教材 -S4C IRB 基本操作培 训 教 材目 录1、培训教材介绍2、机器人系统安全及环境保护 3、机器人综述4、机器人启动5、用窗口进行工作6、手动操作机器人7、机器人自动生产8、编程与测试9、输入与输出10、系统备份与冷启动11、机器人保养检查表附录1、机器人安全控制链附录2、定义工具中心点附录3、文件管理1、 培训教材介绍本教材解释ABB机器人的基本操作、运行。你为了理解其内容不需要任何先前的机器人经验。本教材被分为十一章,各章分别描述一个特别的工作任务和实现的方法。各章互相间有一定联系。因此应该按他们在书中的顺序阅读。借助此教材学习操作操作机器人是我们的目的,但是仅仅阅读此教材也应该能帮助你理解机器人的基本的操作。此教材依照标准的安装而写,具体根据系统的配置会有差异。机器人的控制柜有两种型号。一种小,一种大。本教材选用小型号的控制柜表示。大的控制柜的柜橱有和大的一个同样的操作面板,但是位于另一个位置。请注意这教材仅仅描述实现通常的工作作业的某一种方法,如果你是经验丰富的用户,可以有其他的方法。其他的方法和更详细的信息看下列手册。使用指南提供全部自
2、动操纵功能的描述并详细描述程序设计语言。此手册是操作员和程序编制员的参照手册。产品手册提供安装、机器人故障定位等方面的信息。如果你仅希望能运行程序,手动操作机器人、由软盘调入程序等,不必要读8-11章。2、 机器人系统安全及环境保护机器人系统复杂而且危险性大,在训练期间里,或者任何别的操作过程都必须注意安全。无论任何时间进入机器人周围的保护的空间都可能导致严重的伤害。只有经过培训认证的人员才可以进入该区域。请严格注意。以下的安全守则必须遵守。 万一发生火灾,请使用二氧化碳灭火器。 急停开关(E-Stop)不允许被短接。 机器人处于自动模式时,不允许进入其运动所及的区域。 在任何情况下,不要使用原始盘,用复制盘。 搬运时,机器停止,机器人不应置物,应空机。 意外或不正常情况下,均可使用E-Stop键,停止运行。在编程,测试及维修时必须注意既使在低速时,机器人仍然是非常有力的,其动量很大,必须将机器人置于手动模式。 气路系统中的压力可达0.6MP,任何相关检修都要断开气源。 在不用移动机器人及运行程序时,须及时释放使能器(Enable Device)。 调试人员进入机器人工作区时,须随身携
3、带示教器,以防他人无意误操作。 在得到停电通知时,要预先关断机器人的主电源及气源。 突然停电后,要赶在来电之前预先关闭机器人的主电源开关,并及时取下夹具上的工件。 维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程序及参数。安全事项在用户指南安全一章中有详细说明。如何处理现场作业产生的废弃物现场服务产生的危险固体废弃物有:废工业电池、废电路板、废润滑油和废油脂、粘油回丝或抹布、废油桶。普通固体废弃物有:损坏零件和包装材料。 现场服务产生的损坏零件由我公司现场服务人员或客户修复后再使用;废包装材料,我方现场服务人员建议客户交回收公司回收再利用。 现场服务产生的废工业电池和废电路板,由我公司现场服务人员带回后交还供应商;或由客户保管,在购买新电池时作为交换物。废润滑油及废油脂、废油桶、粘油废棉丝和抹布,由我方现场服务人员建议客户分类收集后交给专业公司处理。3、 机器人综述3.1 S4C系统介绍:常规型号:IRB140,IRB 1400,IRB 2400,IRB 4400,IRB640,IRB6400 IRB 指 ABB 机 器 人,第一位数(1,2
4、,4,6)指机器人大小第二位数( 4 )指机器人属于S4或S4C,S4C plus系统。无论何型号,机器人控制部分基本相同。IRB 140:体积小,承载较小,最大承载为5kg,常用于焊接。IRB 1400:承载较小,最大承载为 5kg ,常用于焊接。IRB 2400:承载较小,最大承载为 16kg ,常用于焊接。IRB 4400:承载较大,最大承载为60kg常用于搬运或大范围焊接。IRB 640:4轴机器人,最大承载量160kg,常用于堆垛。IRB 6400:承载较大,最大承载为250kg,常用于搬运或点焊。特殊型号:IRB340,IRB7600,IRB840,IRB540,IRB580IRB 340:承载很小,最大承载量1kg, 速度极快,常用于取件。IRB 7600:承载量很大,最大承载量500kg, 常用于汽车工业。IRB 540,580:承载量较小,防爆性很好,喷涂专用。3.2 机器人组成:机器人由两部分组成:Controller:控制器。Manipulator:机械手。操作人员通过示教器和操作盘操作机器人。左边是示教器(Teach Pendant)。右边是操作盘 (Opera
《abb机器人操作培训(s4c_irb)_说明书_完整版》由会员小**分享,可在线阅读,更多相关《abb机器人操作培训(s4c_irb)_说明书_完整版》请在金锄头文库上搜索。
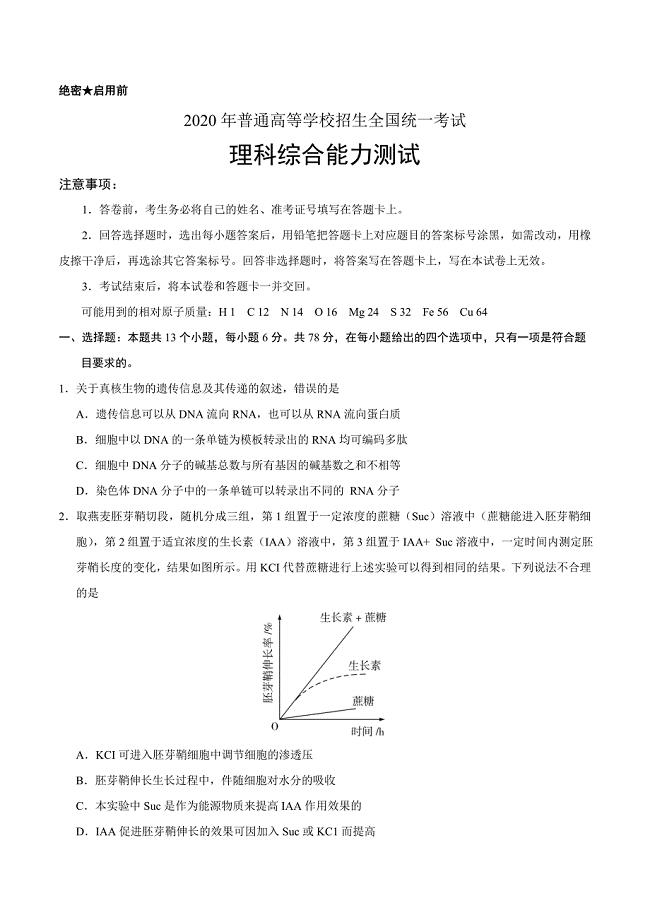
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页