
数控技术课后答案
10页
1、 第3章习题解答3.1 简述数控伺服系统的组成和作用。数控伺服驱动系统按有无反馈检测元件分为开环和闭环(含半闭环)两种类型。开环伺服系统由驱动控制单元、执行元件和机床组成。驱动控制单元的作用是将进给指令转化为执行元件所需要的信号形式,执行元件则将该信号转化为相应的机械位移。闭环(半闭环)伺服系统由执行元件、驱动控制单元、机床,以及反馈检测元件、比较环节组成。位置反馈元件将工作台的实际位置检测后反馈给比较环节,比较环节将指令信号和反馈信号进行比较,以两者的差值作为伺服系统的跟随误差,经驱动控制单元驱动和控制执行元件带动工作台运动。3.2 数控机床对伺服系统有哪些基本要求? 数控机床对伺服系统的基本要求: 精度高; 快速响应特性好; 调速范围宽; 系统可靠性好。3.3 数控伺服系统有哪几种类型?简述各自的特点。数控伺服系统按有无检测装置分为开环伺服系统、半闭环伺服系统和闭环伺服系统。 开环伺服系统是指不带位置反馈装置的控制方式。开环控制具有结构简单和价格低廉等优点。 半闭环伺服系统是通过检测伺服电机的转角间接地检测出运动部件的位移(或角位移)反馈给数控装置的比较器,与输入指令进行比较,用差
2、值控制运动部件。这种系统的调试十分方便,并具有良好的系统稳定性。闭环伺服系统将直接测量到的位移或角位移反馈到数控装置的比较器中与输入指令位移量进行比较,用差值控制运动部件,使运动部件严格按实际需要的位移量运动。闭环控制系统的运动精度主要取决于检测装置的精度,而与机械传动链的误差无关,其控制精度将超过半闭环系统。3.4 简述步进电动机的分类及其一般工作原理。从结构上看,步进电动机分为反应式与激磁式,激磁式又可分为供电激磁和永磁式两种。按定子数目可分为单段定子式与多段定子式。按相数可分为单相、两相、三相及多相,转子做成多极。在输入电信号之前,转子静止不动;电信号到来之后,转子立即转动,且转向、转速随电信号的方向和大小而改变,同时带动一定的负载运动;电信号一旦消失,转子立即自行停转。3.5 什么是步距角?步进电机的步距角大小取决于哪些因素? 步进电机的步距角是反映步进电机绕组的通电状态每改变一次,转子转过的角度。步距角一般由定子相数、转子齿数和通电方式决定。3.6 试比较交流和直流伺服电动机的特点。直流伺服电机具有优良的调速性能,启动、运行和制动灵活、方便,因而在对速度调节有较高要求的场合,
3、直流伺服系统一直占据主导地位。但它存在固有的弱点,如电刷和换向器工作中易磨损,需经常维护,换向器形状非常复杂,换向时还会产生火花,这给制造和维护都带来很大的困难。交流伺服电机采用了全封闭无刷构造,不需定期检查和维修。它的定子省去了铸件壳体,结构紧凑,外形小,重量轻。空心杯转子的转动惯量很小,反应迅速,而且运转平稳。3.7 分析交流和直流伺服电动机的速度调节方式。直流伺服电动机常用的调速方式有两种: 晶闸管直流调速(SCR) 晶闸管直流调速是通过调节触发装置的控制电压大小(控制晶闸管的开放角)来移动触发脉冲的相位,从而改变了整流电压的大小,使直流电动机电枢电压变化而平滑调速。 脉宽调制直流调速(PWM) PWM调速是在大功率开关晶体管的基极上,加上脉宽可调的方波电压,控制开关管的导通率,达到调速的目的。交流伺服电动机调速通常由调频调速的方法实现。实现调频调压有多种方法,通常都是采用交流直流交流的变换电路来实现,这种电路的主要组成部分是电流逆变器。3.8 步进式伺服系统是如何对机床工作台的位移、速度和进给方向进行控制的? 工作台位移量的控制 数控装置发出N个进给脉冲,使步进电动机定子绕组的
4、通电状态变化N次,则步进电动机转过的角位移量=N(为步距角)。该角位移经丝杠螺母副之后转化为工作台的位移量L,即进给脉冲数决定了工作台的直线位移量。 工作台运动方向的控制 当数控装置发出的进给脉冲是正向时,经驱动控制线路之后,步进电动机的定子绕组按一定顺序依次通电、断电。当进给脉冲是反向时,定子各相绕组则按相反的顺序通电、断电。因此,改变进给脉冲的方向,可改变定子绕组的通电顺序,使步进电动机正转或反转,从而改变工作台的进给方向。 工作台进给速度的控制 若数控装置发出的进给脉冲的频率为f,经驱动控制线路后,转换为控制步进电动机定子绕组的通电、断电的电平信号变化频率,由于转速=60f(为脉冲当量),所以定子绕组通电状态的变化频率决定步进电机转子的转速。该转速经过丝杠螺母副传递之后,转化为工作台的进给速度。3.9 如何提高步进式伺服驱动系统的精度? 从控制方法上采取以下措施提高步进式伺服驱动系统的精度: 传动间隙补偿; 螺距误差补偿; 细分线路。 3.10 简述鉴相式伺服系统的组成和工作原理。鉴相式伺服系统由基准信号发生器、脉冲调相器、检测元件及信号处理线路、鉴相器、驱动线路和执行元件等组成
《数控技术课后答案》由会员206****923分享,可在线阅读,更多相关《数控技术课后答案》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
初中人教版七年级上册下册全册生物复习提纲21页 (1)
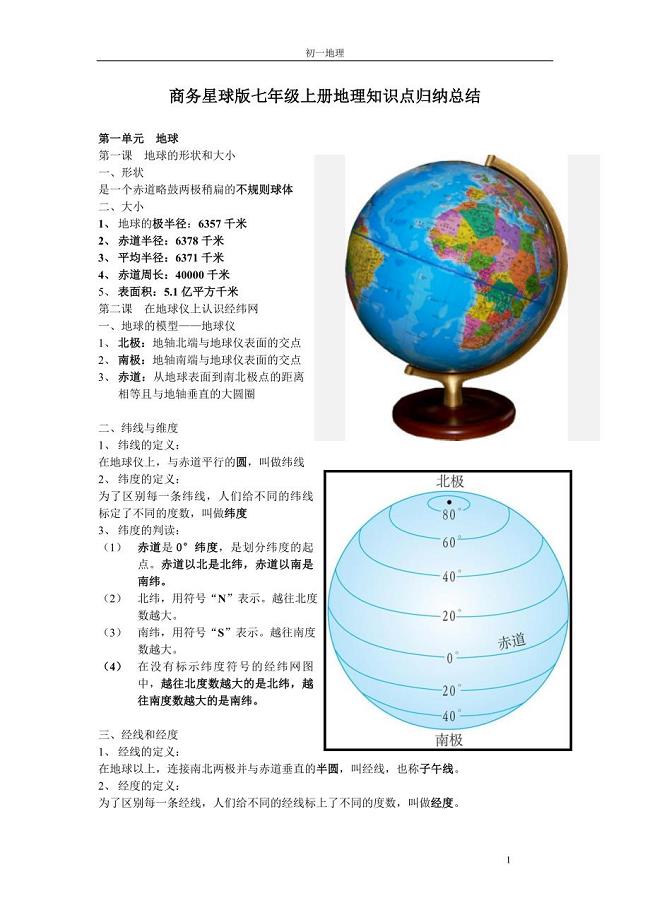
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页