
数控技术及应用试题02195
6页
1、全国2011年10月高等教育自学考试数控技术及应用试题课程代码:02195一、单项选择题(本大题共20小题,每小题2分,共40分)在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。错选、多选或未选均无分。1.闭环控制系统与半闭环控制系统的主要区别是()A.采用的数控系统不同B.采用的位置传感器种类不同C.位置传感器的安装位置不同D.采用的位置传感器精度不同2.采用G02圆弧插补指令编程时()A.X、Y采用绝对坐标,I、J采用绝对坐标还是增量坐标取决于G90和G91B.X、Y采用增量坐标,I、J采用绝对坐标还是增量坐标取决于G90和G91C.I、J采用绝对坐标,X、Y采用绝对坐标还是增量坐标取决于G90和G91D.I、J采用增量坐标,X、Y采用绝对坐标还是增量坐标取决于G90和G913.基于教材JB3208-83标准,控制主轴转动与停止的有关M代码是()A.M00、M01和M02B.M03、M04和M05C.M07、M08和M09D.M06、M13和M144.逐点比较法插补的特点是运算直观、输出脉冲均匀且速度变化小,其插补误差()A.小于l/2个脉冲当量B
2、.小于1个脉冲当量C.小于2个脉冲当量D.小于5个脉冲当量5.数控机床的位置控制装置由()A.伺服机构和执行元件组成B.机械机构和液压系统组成C.检测元件和PLC组成D.速度比较环节和位置比较环节组成6.滚动导轨预紧的目的是()A.增加阻尼比,提高抗振性B.减少机床的热变形C.提高接触刚度D.加大摩擦力,使牵引力增加7.数控机床的动刚度与静刚度的关系可用公式表示为,公式中的入表示()A.阻尼比B.频率比C.激振力频率D.机床结构系统的固有频率8.增量式脉冲发生器最高允许测量转速受其单次脉冲宽度的限制。若脉冲发生器每转输出脉冲数为120,单次脉冲的脉冲宽度不能小于4s,则该脉冲发生器最高允许的测量转速为()A.1000r/minB.2000r/minC.12500r/minD.125000r/min9.当光栅传感器读数头移动一个栅距,光栅副形成的莫尔条纹将移动()A.1个栅距B.2个栅距C.1个条纹间距D.2个条纹间距10.在FANUC15系统中所采用的高分辨率绝对脉冲编码器,其每转输出脉冲数为10万个。如果将它和导程为10mm的进给滚珠丝杠直接相连接,那么理论上可以达到的最小位移检测单
《数控技术及应用试题02195》由会员206****923分享,可在线阅读,更多相关《数控技术及应用试题02195》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
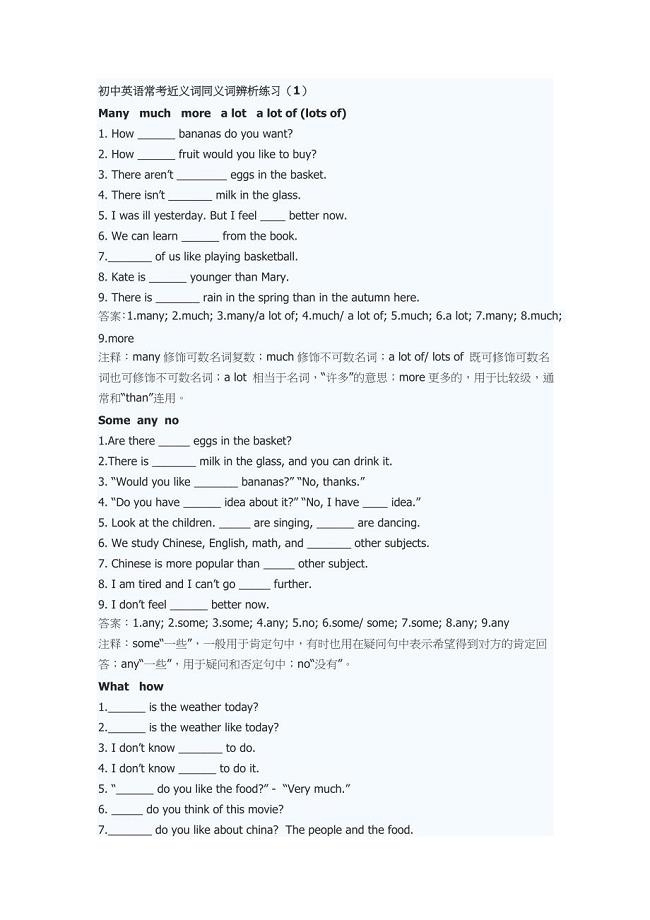
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
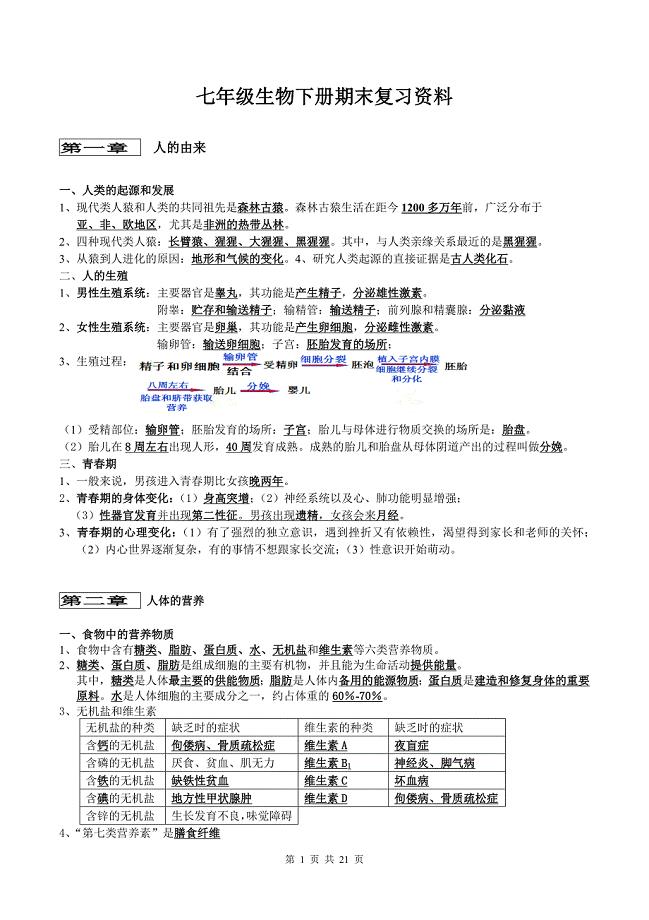
初中人教版七年级上册下册全册生物复习提纲21页 (1)
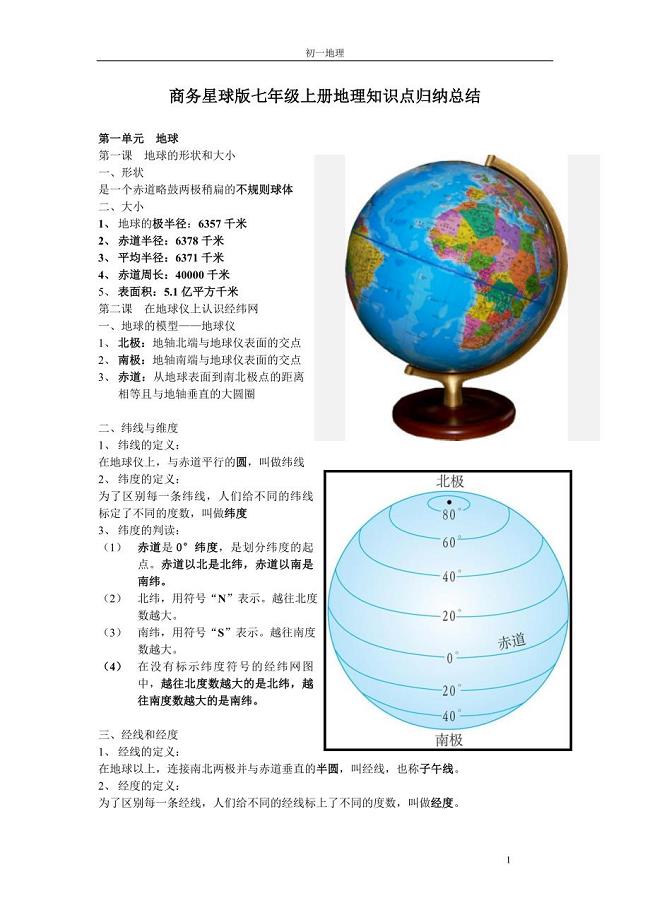
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页
2023年北京市西城区八年级(下)期末语文试卷【含答案】
2024-04-23 16页
江苏省南京市2024年中考数学模拟题【含答案】
2024-04-23 18页
上海市奉贤区2024届高三二模语文试题【含答案】
2024-04-23 8页
统编版小学语文六年级下册第四单元知识小结
2024-04-23 11页