
基于LabVIEW软件的PID自动控制
29页
1、苏州大学 机电工程学院 Soochow University of Mechanical and Electrical Engineering课程设计报告 Curriculum design 课 题 名 称:基于LabVIEW软件的PID自动控制学 院: *院专 业: *姓 名: 学 号: 目 录一、 PID控制原理11、PID 控制介绍12、PID 控制规律13、PID 控制的性能指标34、PID 控制器参数整定的分类35、PID 相关控制56、数字 PID7二、 LabVIEW8.5软件91、简介92、特点103、虚拟仪器114、应用领域12三、前期练习题目与内容14四、设计内容与要求 17 1、设计内容172、设计要求17五、设计方案181、设计思路182、程序框图设计203、控制面板设计21六、 最终设计结果及运行情况221、程序框图222、控制面板22七、 课程设计心得25- - 27 - -基于LabVIEW软件的PID自动控制一、PID控制原理1、PID 控制介绍PID 控制是过程控制中广泛应用的一种控制,简单的说就是按偏差的比例(proportional)、积分(Int
2、egral)、微分(Derivative)进行的控制。当今,尽管各种高级控制在不断的完善,但目前在实际生产过程中应用最多的仍是常规 PID 控制,其原因是:1) 各种高级控制在应用上还不完善;2) 大多数控制对象使用常规 PID 控制即可以满足实际的需要;3) 高级控制难以被企业技术人员掌握。PID 控制器具有结构简单,参数易于调整等优点。在长期的工程实践中,人们对 PID控制己经积累了丰富的经验。特别是在那些实际过程控制中,控制对象的精确数学模型难以建立,系统参数又经常发生变化,常采用 PID 控制器,并根据经验进行在线整定。以下将从 PID 控制规律、PID 控制的性能指标及 PID 控制参数整定三个方面对 PID 控制做进一步的介绍。2、PID 控制规律PID(Proportional,Integral and Differential)控制器是一种基于“过去”,“现在”和“未来”信息估计的简单算法。常规 PID 控制系统原理框图如图 3-1 所示,系统主要由 PID 控制器和被控对象组成。作为一种线性控制器,它根据给定值 r(t)与实际输出值 y(t)构成控制偏差 e(t),将
3、偏差按比例、积分、和微分通过线性组合构成控制量 u(t),对被控对象进行控制。控制器的输入输出关系为:式中 u(t)是 PID 控制器的输出,e(t)是 PID 控制器的输入,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数。采用 PID 控制器的控制系统如图所示。PID 调节器的传递函数为:比例、积分和微分三个环节的控制是相互关联的,三个参数可以分别调节,也可以只采用其中一种或两种控制规律。简单的说,PID 控制器各环节的作用如下所述:(1)比例环节:即成比例地反映控制系统的偏差信号 e(t),系统偏差一旦产生,调节器立即产生与其成比例的控制作用,以减小偏差。比例控制反应快,但对某些系统,可能存在稳态误差。加大比例系数 Kp,系统的稳态误差会减小,但稳定性可能变差。(2)积分环节:积分的控制作用主要用于消除稳态误差,提高系统的无差度。积分作用的强弱取决于积分时间常数,积分速度越慢,积分作用越弱,反之则越强。积分环节可能使系统的频带变窄。积分控制通常与其它控制规律结合,组成 PI 控制器或 PID 控制器。(3)微分环节:微分的作用是能反映偏差信号的变化速率,具有预见性,能预见偏
4、差信号的变化趋势,并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的响应速度,减少超调,减小调节时间。由于微分反映的是变化率,所以当输入没有变化时,微分环节的输出为零。微分控制通常与其它控制规律结合,组成 PD或者 PID 控制器。为了能更好地理解三个环节具体的设计经验,在这里我们以 PI 控制为例加以说明。实际上,根据我们长期的工作经验及对 PID 控制理论的认识,在实际的生产过程中,PI 控制可以满足大多数过程控制的要求。PI 控制的知识及经验可描述如下:(1)比例主要影响响应速度,Kp愈大,响应愈快,但太大会引起较大的超调和振荡,甚至产生不稳定。Kp增大则超调增加,上升时间减短;反之,Kp 减小则超调减小,上升时间延长。(2)积分时间 Ti表示由积分作用产生一个比例调节效果的大小。Ti主要影响静态精度,消除静差。稳态时,Ti越大,积分速度越慢,消除静差越慢。反之,Ti越小,积分速度越快,消除静差越快。但积分控制作用太强会使静态性能变差。(3)在偏差较大时,PI 控制器以提高系统动态响应速度为主。为尽快消除偏差,Kp应取大值,Ti应取小值;在偏差较小
《基于LabVIEW软件的PID自动控制》由会员206****923分享,可在线阅读,更多相关《基于LabVIEW软件的PID自动控制》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
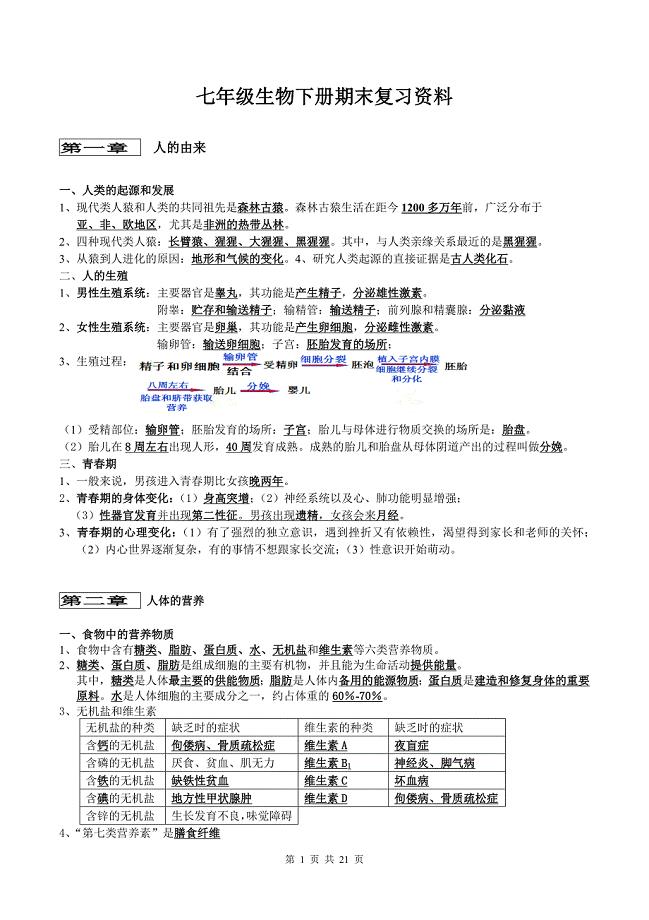
初中人教版七年级上册下册全册生物复习提纲21页 (1)
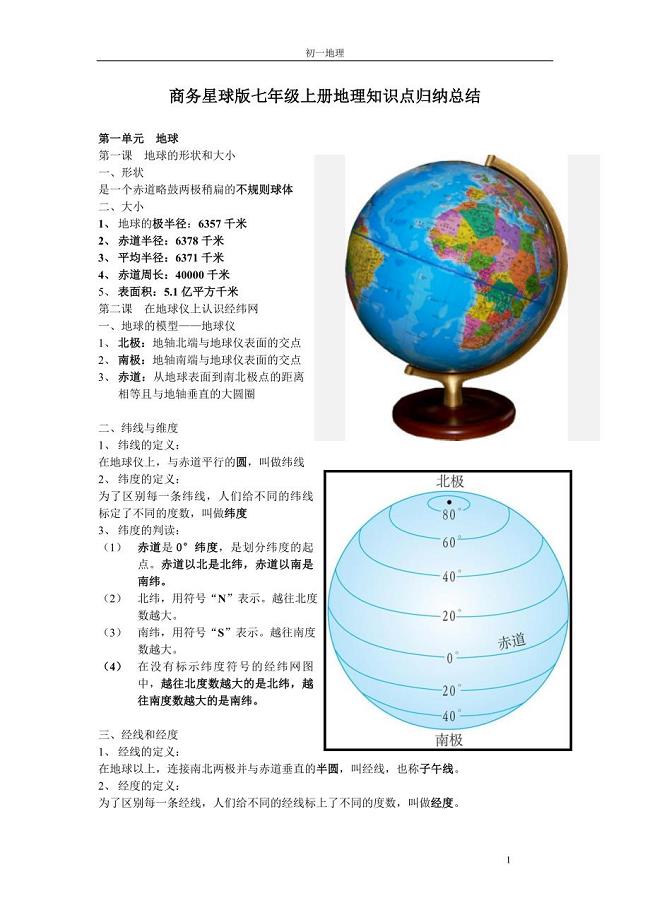
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 北京市通州区2023-2024学年九年级下学期月考数学试题
北京市通州区2023-2024学年九年级下学期月考数学试题
2024-04-11 49页
译林版(三起)六年级上册期末复习卷(二)
2024-04-11 6页
因式分解300题中
2024-04-11 18页
2024年陕西省西咸新区中考一模数学试题
2024-04-11 40页
2024年陕西省汉中市中考三模数学试题
2024-04-11 49页
湖北省咸丰县城区2023-2024学年九年级下学期联考数学试题(1)
2024-04-11 45页
专题04 100以内数的认识-2023-2024学年一年级数学下学期期中专项复习(人教版)
2024-04-11 18页
期末易错专项01:单选题-英语六年级上册译林版(三起)
2024-04-11 8页
江西省南昌市青山湖区2023-2024学年九年级下学期月考数学试题
2024-04-11 43页
期末易错专项02:用单词正确形式填空
2024-04-11 6页