
数控机床的特点与分类(word文档)
15页
1、 数控机床的特点与分类数控机床是一种高度自动化的新型机床,是自动化控制原理在机床方面的应用,但是,它与在此以前的自动机床具有本质的区别,不能混为一谈。本章将着重从控制原理和机床结构等方面阐明数控机床的特点,并按照最常见的几种原则对数控机床作分类介绍。第一节 数控机床的逻辑方框图机床自动化,一般包括两个主要方面的内容:刀具和工件之间相对运动的顺序,或称程序刀具和工件之间相对运动的距离,或称行程数控机床与普通自动化机床的主要区别就是:普通自动化机床虽然也可以用插销板、步进选线器、继电器逻辑电路甚至穿孔卡等来控制其各种加工动作的先后程序,而对于行程则只能用模拟某个尺寸的几何量,例如两个挡块间的距离或凸轮的升程等来控制;数控机床则是直接按零件所要加工的尺寸数字量或经过代码化的数字码来控制。所以前者通常称为行程式程序控制机床,而后者则称为数字式程序控制机床。数控机床大都通过运算、控制装置来实现其程序和行程的控制,通过各种辅助机能来对变速、换位、换刀等辅助动作进行控制。图2-1是数控机床的逻辑方框图及示意图。由图2-1可知,数控机床一般包括四个基本组成部分:控制介质、数控装置、伺服机构和机床。有时
2、为了进一步提髙机床的加工精度和生产效率,在上述控制系统外再加一个测量装置,如图中虚线框内所示。第二节 数控技术中的主要环节从生产准备过程到零件加工完成,全部数控过程一共包括四次转换:首先是加工指令形式的转换,从普通的设计图纸和工艺文件转换为数控装置能够识别的控制介质;第二次是信息形式的转换,把控制介质输入的数字量变成相应的电信号;第三次是能量形式的转换,由电信号控制和放大的电能变成机械能;第四次是运动形式的转换,由驱动机构的简单回转运动变为形式更加复杂的加工运动和辅助运动。这一系列性质各异而又密切相关的转换,实质上是有关信息的产生、传递、处理和转换执行的过程,这就是数控技术的基本过程,也就是数控技术的主要技术环节。、指令形式的转换数控机床工作前,首先要由工艺人员根据零件图所规定的尺寸、形状和其它加工要求来编制适用于数控机床要求的工艺,即确定加工顺序、每个工步内机床要移动的距离、主轴转速和进给速度以及机床其它辅助运动等等。这一套工作叫做“程序设计”,或称“为数控机床编程序”。编完程序以后,将程序的内容以数字和文字符号(即所谓代码)的形式填写到程序单内,然后再按照程序单上的数字和文字一一相
3、对应地在纸带上穿孔,制作出穿孔纸带来。穿孔带上孔的不同排列方式,代表着不同的数字和文字,机床的数控系统可以识别它。所以,穿孔纸带就成了数控装置“自己能阅读”的工艺卡片,数控机床将完全按照它指示的内容来工作。这样,数控机床的控制就通过穿孔带来进行了,因此穿孔纸带被称为“控制介质”。从零件图纸和工艺卡片到打出穿孔纸带,这个环节虽然不属于数控机床的一部分,但却.是整个数控技术中的第一环。二、信息形式的转换加工指令信息的转换是通过数控装置来完成的。数控装置是数控机床的运算和控制系统,它利用读带机读带,在接受所读出的数据和指令后,进行必要的运算和逻辑分析,然后将运算结果送到相应的伺服驱动机构去,用以操纵机床,并控制输入过程的进行。最简单的数控装置的逻辑方框图如图2-2所示,图中虚线所包括部分为数控装置。如图所示,在数控装置启动后,输入控制电路发出命令使读带机工作,穿孔带从读带机中自动走过,读带机将穿孔带上的数码和文字代码信号送到译码器,译码器将译出的数码送到运算器,将译出的控制代码送到指令码寄存器、辅助功能寄存器及主控制器。主控制器是数控装置的心脏部分,它控制运算器的运算过程,控制输出装置的方向
4、及座标转换,控制脉冲的输出,同时通过输入控制电路控制读带机的启动和停止。机床主轴转速的更换、进给速度的改变、冷却润滑液的开停、刀具的更换等辅助动作,则都由辅助功能寄存器在主控制器控制下来操纵。机床各座标运动的数值,可通过测量装置的检测送到数码显示器中表示出来,并且可以反馈到主控制器中。数控装置是数控技术中的核心部件,也是数控机床与其它自动化机床控制技术中具有本质区别的特征所在。三、能量形式的转换数控系统通过加工指令和控制信息的转换,得到了进行加工所需的输出信号,但它并不能把计算的结果直接付诸实施。因为这个信号很微弱,它只是一个控制信号,为此,需对之进行放大、整形和适当分配,使之成为驱动机床电器元件的较强电能;同时,欲使电能变为能使机床部件运动的机械能,也必须通过某种机构进行转换。伺服驱动机构的作用,就在于实现这种能量形式的转换。伺服驱动机构简称伺服机构,它是一个髙精度的随动系统,或者说是个可以进行自动检测的动力控制系统,其中包括一个置于系统前端的功率放大器。伺服机构在数控系统中的作用是:接受数控装置发出的脉冲信号,并且把它变换成模拟量(如转角、电压、相位等),经功率放大后去驱动工作台,
《数控机床的特点与分类(word文档)》由会员jiups****uk12分享,可在线阅读,更多相关《数控机床的特点与分类(word文档)》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
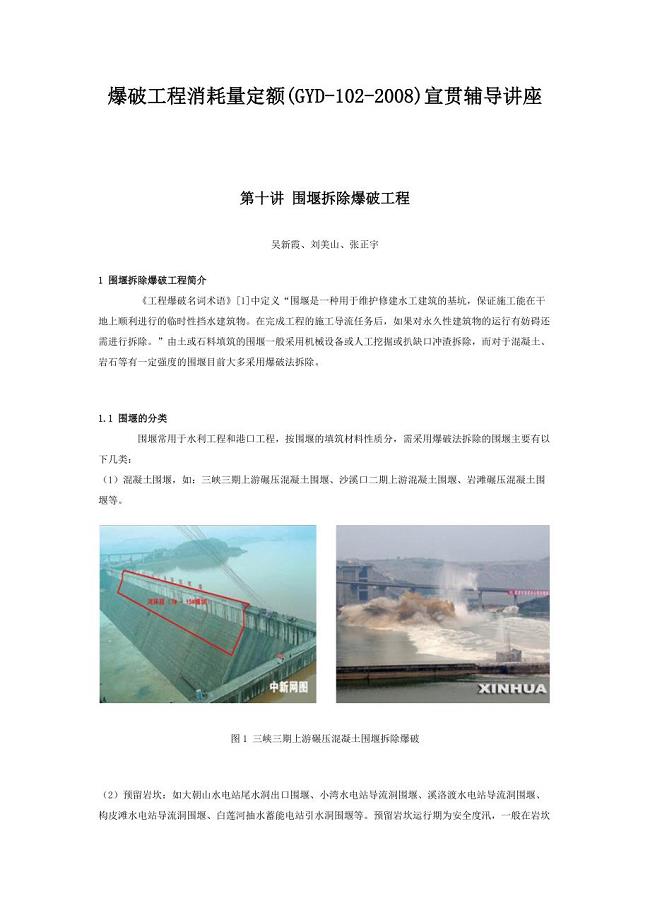
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
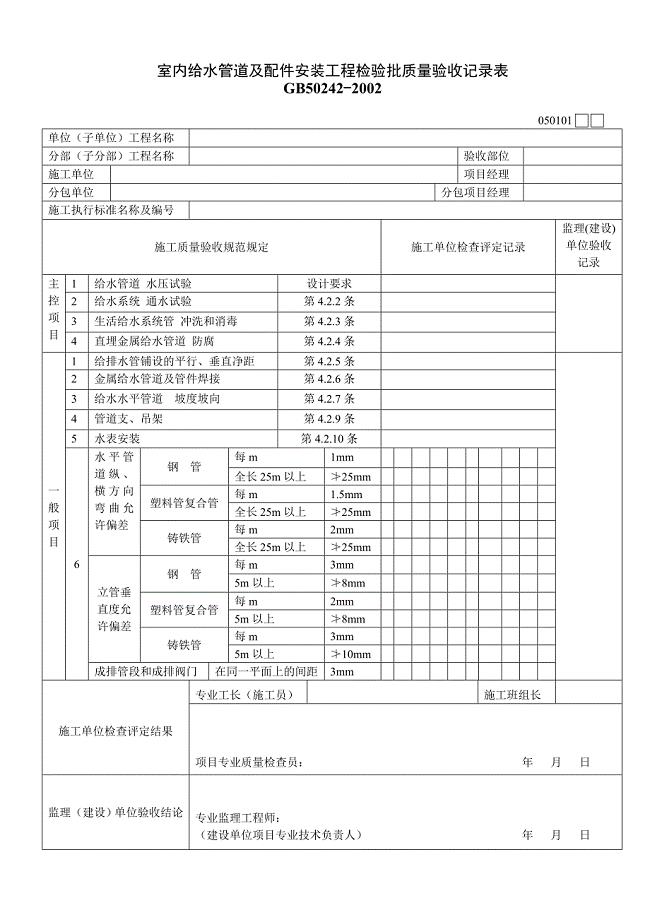
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 小数数学题:简便计算11道练习题及参考答案A10
小数数学题:简便计算11道练习题及参考答案A10
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A7
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A3
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A5
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A9
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A6
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A8
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A1
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A4
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A2
2024-04-17 2页