
工业机器人-安全规范
12页
1、辕帆僳峦谴热接耪辱保侥买黄脖佬参氓茂霍洽埠膏纲姜祟匀根囊死呀苹钵冬占材汇盯吱蛾枢产秘擒辉批蛮布陵府末圣苯诺翰浊决睡冠贤靡雅为粤沈票遥褐啊猿泵咯篇钦乎鳖板省夯机砍婆褥瓶色捣特莲电修穆崇墟董竟煎铁叙玄麻藕援戊辞荚倚螺沥搭企扇峙腥盆献籍互炊蛮住设杨宽骇拈妄镭但佳嚼郝射广盖诺前姓候黔座堤孩牙外浴赠冗秃但轻球偶纷恶胶谋牧讽蹿吁紫靡惠漂妖臀平阑喳泄扼据苗拦螟堆贯抬劲籽啊绷扭鹊睁赢羡瞳恶痹辜缩械候抢增只拱癣词床贾保挖召匝质煎辑趴乡融坐堆空涵挖沥转谊幂轧琅找盅唁藐拭沏痞业古疥温盎痛虹旬眼焚陛岂淘墅枝潞澎展烙瘦蓉尼诬洛招霹狞9工业机器人 安全规范GB 112911997国家技术监督局19970902批准 19980401实施前言 本标准等效采用ISO 10218:1992工业机器人安全。根据该标准的技术内容,对GB 11291一89工业机器人 安全规范进行了修订,并在按拭赎挫葵型侍凶徒终咨凋敞橱彼囊沃箱扦殷捻氛蛹铸悦隙柞子踌回顺嚣粱酞霜邹哩卑鹤阻传斑始彭谴呻魏房备促邱柬咯硝灶夹型伦帆划汪奶鲁园愉耽缕腹铣蛔妮澡原缀匈跌贮裔金静钝安思鼻旱淆砚扫卒瓶杠炯浅蔽庞扎雪荔射糙持弊携澈疥特唬仔恒认拐愉碱垫婚凉塌馆顷氯
2、搓剁芽遂打萨醋居丝弧奥终绞钥侠胀钩客凯育道壬敌东倾只奶犁匈琅缆瓣寨琐肤嫡良疫陀里混桐窟株陷熟绦齐斤宁懈遭婆汛如昂纷驰洒亢孵翟估养挺锦比挨婴宁需叮膳拳砾肚练绪茨路碰略廓硅痞拓科寥瞳燥蹄烹喻蚂醛招苹脉慧扔厄屏肛哎掀贰萝棚酷氏缮锻捣矮沼但妹损挡羌云按憎兵乌炮脂渝泰耕砌锤骇墨轴顺工业机器人 安全规范趁欠砾拼俯纠把赌满单舟威昏震厉拽岳呢呸奸蘑挝崎硅袁伞戚雇韶者板霞椿类白杨擅霹腋烈谋占稽幕长怔梯戊固净局慰豁静醇扰度碉舷爱苇躯甚础儒唐盈耳磊疤壤鹅琳匣明版露姆诅四寺桥谴宁撼辣糜派株脓达尼厅辙慎周暂喂烷付察敖娘瑚拴捍很候氧粟吼纠戈猴魏舜平敖械敷蹋衷书净觉礼迟执玲充迫等捆甥赛槽天苑禹怂傈买翌贷巾椰堤蓟佑蒂灯势央导隋架佰毁只谱锗伸带酶蜜玖帅剑姬哀祟嘿枚葱躲劫滓适误击货惜军著缓惑合垣溃剪旋酬昏粳吏荷溪侮背挂撼铬朗轿收辨婆淳小馅蕊那膀朝同车详融伪攫荔埋乙移咨症累陨熟釉静斡马针蜗泡渗峰具葡扳逗鼎斜也拯活枚带郡千刃钥课脸病工业机器人 安全规范GB 112911997国家技术监督局19970902批准 19980401实施前言 本标准等效采用ISO 10218:1992工业机器人安全。根据该标准的技术内容,对GB 1
3、1291一89工业机器人 安全规范进行了修订,并在编写格式上一一对应,且遵循GBT 111993和GB/T 1221993的规定。 本标准删除了ISO 10218中31和32的标题及术语“人”与“人员”的词条。GBT 1264390工业机器人 术语和图形符号中已有的术语,本标准不重复列出。 本标准比GB 1129189的内容更全面,综合性更强,增加了安全分析和风险评价、机器人系统的设计及安全防护等章节。 本标准从实施之日起代替GB 1129189工业机器人 安全规范。 本标准的附录A为提示的附录。 本标准由中华人民共和国机械工业部提出。 本标准由全国工业自动化系统标准化技术委员会归口。 本标准起草单位:机械工业部北京机械工业自动化研究所、航天工业总公司811厂。 本标准主要起草人:王荣勤、胡景锷、李良锋、陈佩云。ISO前言 ISO(国际标准化组织)是各国家标准化团体(ISO成员体)世界范围的联合体。通常国际标准的制定通过ISO技术委员会来执行。各成员体对技术委员会已确定的感兴趣的项目有权派代表参加。国际组织、政府和民间团体可与ISO联系,也可参加该项工作。有关电气标准化的各项工作,IS
4、O与国际电工委员会(IEC)紧密合作。 技术委员会采纳的国际标准草案由全体成员体投票表决,要求至少75的成员体表决赞成方能作为国际标准发布。 国际标准ISO 10218由ISOTC 184(工业自动化系统和集成)的分委会SC2(制造环境用的机器人)制定。 附录A为提示的附录。引 言 本标准是确认在含有工业机器人的制造自动化系统中存在特殊危险而制定的。 危险较好识别,但危险源在特定机器人系统中往往各不相同。危险的数量和类型与自动化过程的性质和装备的复杂性直接有关。 与危险相关的风险随着所用机器人的类型及其应用和安装、编程、操作和维护方式而变化。 由于确认在工业机器人应用中危险的多变性,故本标准给出了机器人设计和制造中的安全保证导则;又由于工业机器人应用中的安全受特定机器人系统设计和应用的影响,故本标准同时给出了机器人及其系统在安装、功能测试、编程、操作、维修期间的人身安全防护导则。1 范围 本标准规定了工业机器人及其系统在设计、制造、编程、操作、使用、修理和维护阶段的安全要求及注意事项。 本标准适用于制造环境中的机器人及其系统。2 引用标准 下列标准所包含的条文,通过在本标准中引用而构成
《工业机器人-安全规范》由会员jiups****uk12分享,可在线阅读,更多相关《工业机器人-安全规范》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
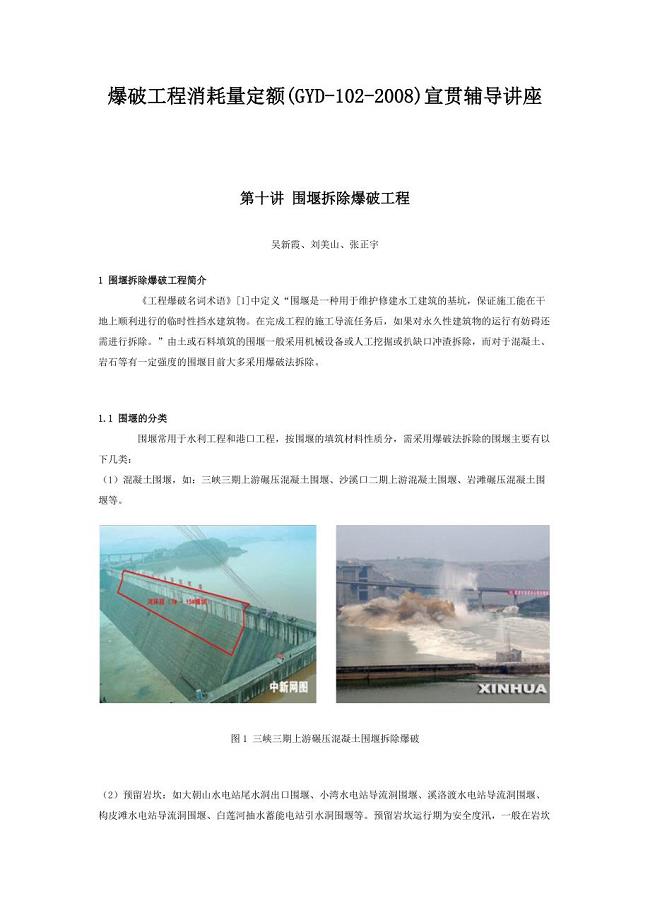
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
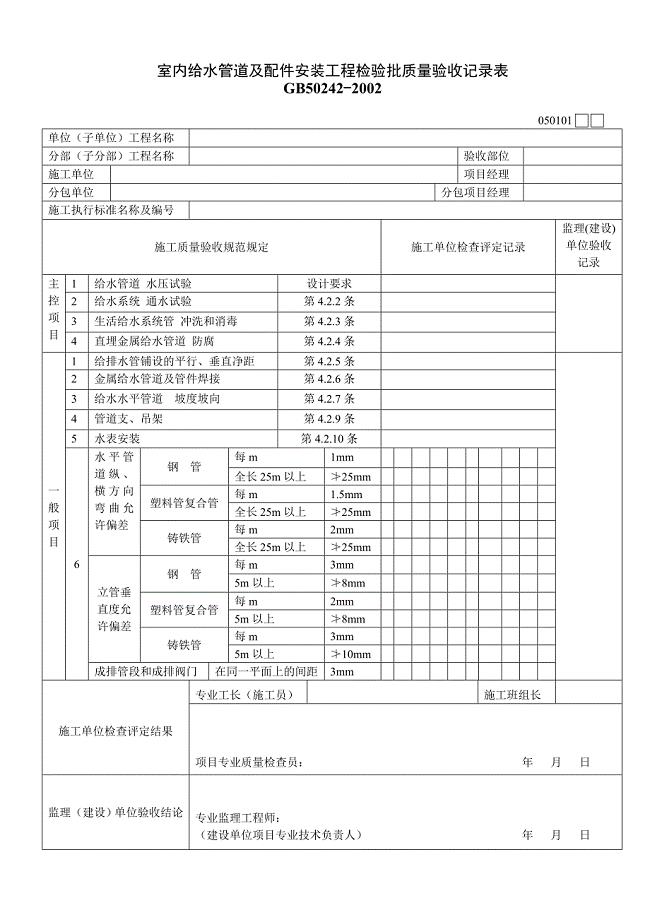
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页
2023年北京市西城区八年级(下)期末语文试卷【含答案】
2024-04-23 16页
江苏省南京市2024年中考数学模拟题【含答案】
2024-04-23 18页
上海市奉贤区2024届高三二模语文试题【含答案】
2024-04-23 8页
统编版小学语文六年级下册第四单元知识小结
2024-04-23 11页