
机电产品现代设计方法大作业概要
16页
1、课程名称:机电产品现代设计方法上课时间:2014年春季雷达底座转台设计姓 名:学 号:班 级:1108103所在学院:机电工程学院任课教师:金天国 张旭堂161设计任务雷达底座转台设计: 一个回转自由度,如下图1.1所示。图1.1承载能力:500kg被测件最大尺寸: 500600mm台面跳动:0.02mm台面平面度:0.02mm台面布置T型槽,便于安装负载方位转角范围:120具有机械限位和锁紧机构角度位置测量精度:5角度位置测量重复性:3角速范围:0.001/s60/s2设计流程根据机电产品现代设计方法,其设计流程大致如下图2.1所示。图2.1根据上图所示,整个设计过程可分为四个阶段:功能设计、总体方案设计、详细设计和设计。功能设计部分,是在结合所给出的重要性的要求及用户可能的功能目标需求的前提下,对转台的功能进行定义分析,将每一个功能细化为一个个的功能元,利用QFD图对实现各种功能的所对应的技术的相对重要性进行分析,相对重要性较高的功能技术便是设计的重点所在。总体方案设计部分,通过利用SysML语言来明确各部分之间的功能参数和参数约束关系,并完成草图的设计。详细设计部分,需要使得零件
2、实现其预定的功能,并保证其精度和强度的设计要求。在详细设计阶段主要是利用cad等三维建模软件,完成系统的3D图,并生产对应的2D图,完成整个设计。对于重要的零部件需要利用有限元软件进行仿真分析,保证其可靠性。最后还需要应用动力学和运动学仿真软件进行相关的动力学和运动学分析,确定设计系统满足功能目标要求。设计总结部分,是对整个设计过程进行反思和总结,考虑整个设计过程中存在的不足和所运用的相关知识。3.QFD需求-功能-技术分析QFD(全称Qualification Function Deployment),是用来对所设计的系统进行总体设计规划的工具。QFD主要功能是能够实现工程设计与消费者或用户需求之间的紧密连接,根据消费者需求和用户目标实现对设计过程的实时修改和控制,把用户的功能目标在整个设计过程中得以体现,并根据需求的重要性对整个系统做出相应的设计规划,有重点的进行设计。本设计根据用户对于雷达底座转台的功能重要性的需求,首先给出其需求和功能之间的联系,如下图3.1所示的质量屋,屋顶为系统的功能,包括驱动元件的转速、体积、重量,及传动元件和传感器的可靠性等,左侧围用户对于系统的功能目标
3、的需求,由用户直接给出的功能,如角度位置测量精度:5、角度位置测量重复性:3、角速范围:0.001/s60/s等和用户潜在的功能需求,如人机交互、成本、节能等方面的需求组成。图3.1中各功能需求后面的数字代表着这些功能的相对重要性,即importance of whats,其数字越大代表其重要性越高,用户对于这些需求的重要性之和应该等于100。质量屋屋顶代表各部分功能之间的相互联系,分为positive、negative和不明确三种情况。图3.1根据功能需求的质量屋可以计算出各部分功能的相对重要性,其相对重要性如下图3.2所示。由图中可以看出,驱动元件转速、传感器精度、传感器分辨力及其灵敏度等相对重要程度较高。图3.2在功能需求关系确定之后,可以进一步根据功能的重要性建立与实现相关功能的技术手段之间的重要性和联系,如下图3.3功能技术图所示。功能技术图的屋顶是实现相关功能可能用到的相应技术手段,与功能需求图相同,屋顶不同的符号表示不同技术手段之间的相关性,也分为positive、negative和不明确三种情况。左侧是在功能需求图的基础上,把功能需求图中得到的有关功能及其对应的重要性移
4、植到功能技术图中。具体情况可以参看图3.3所示,图的最下方是计算所得的相关技术手段的对应的重要程度的数值。图3.3根据上面的功能技术的质量屋可以计算出各部分技术的相对重要性,其相对重要性如下图3.4的柱状图所示。由图可以看出,电动机、编码器、感应同步器、压电加速度传感器等的重要程度较高,也说明在实现用户所要求的功能目标的众多技术手段中,上述这些技术相对更适合所设计的系统。例如,在动力源的选择上,既有液压马达,又有电动机,综合考虑其他因素后,电动机的重要性明显高于液压马达,由此可知系统的动力源应该选用电动机而不是液压马达,这样个有利于和其他技术手段之间的协调性和兼容性。综上所述可知动力源的选择是电动机,位置传感器选择编码盘,加速度传感器选择是压电加速度传感器,变速机构综合考虑是选用可以变速的电动机代替变速机构,故电动机应该选用可以变速的电动机。图3.44.总体方案设计SysML语言是UML语言(Unified Modeling Language,统一建模语言,一种面向对象的标准建模语言,用于软件系统的可视化建模)在系统工程应用领域的延续和扩展,是近年提出的用于系统体系结构设计的多用途建模
《机电产品现代设计方法大作业概要》由会员206****923分享,可在线阅读,更多相关《机电产品现代设计方法大作业概要》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
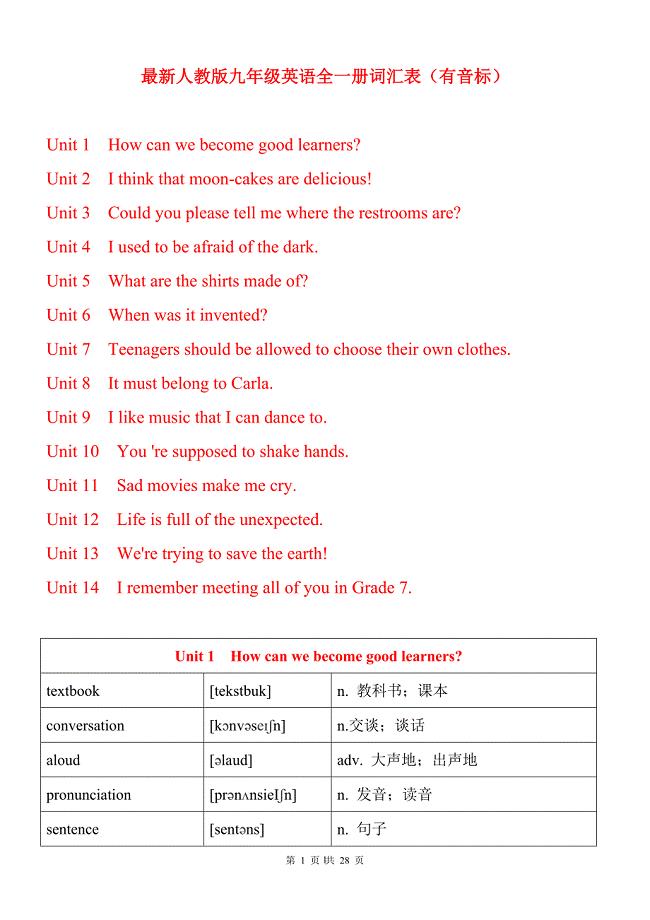
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
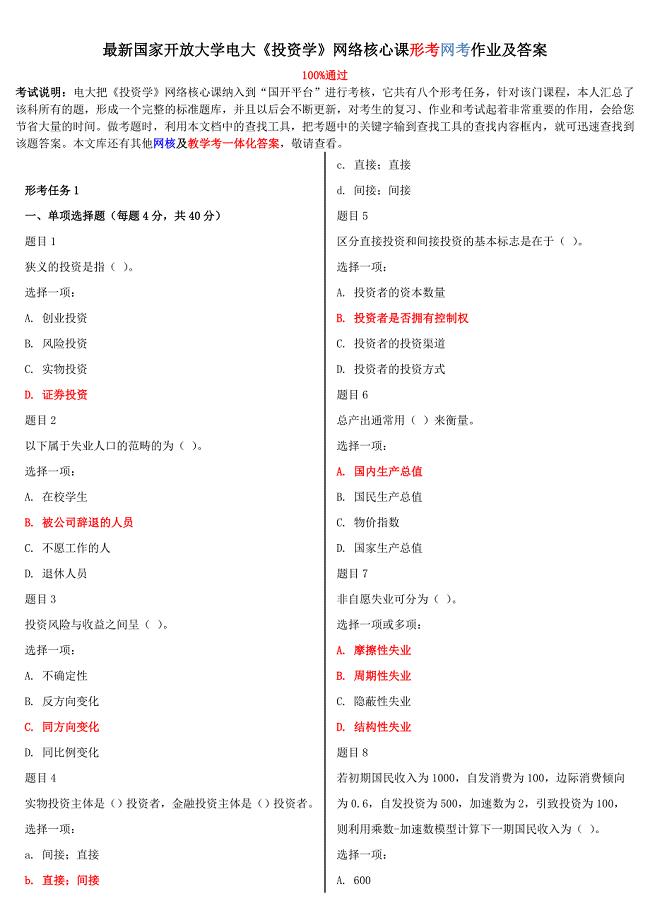
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
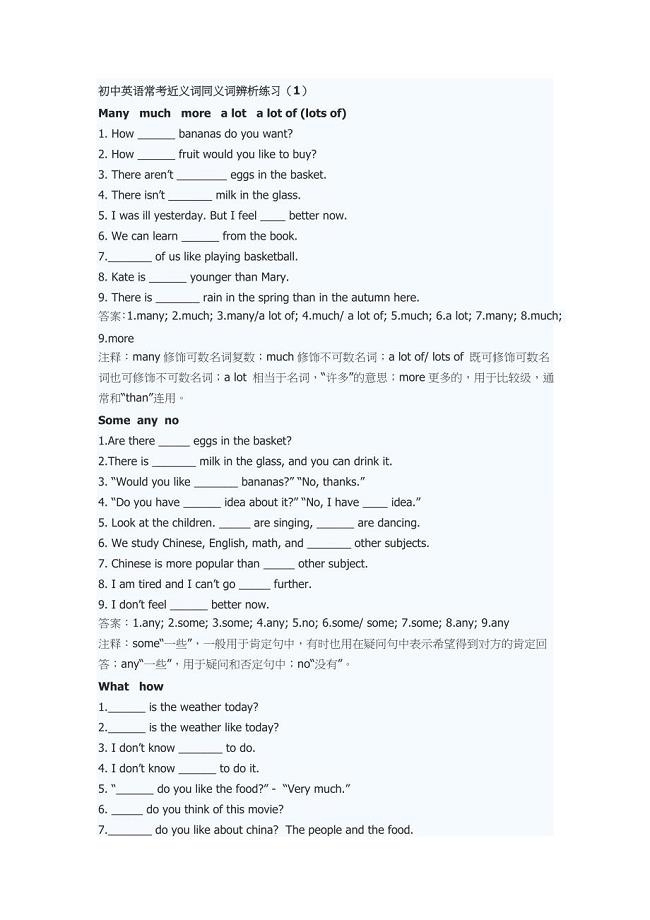
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
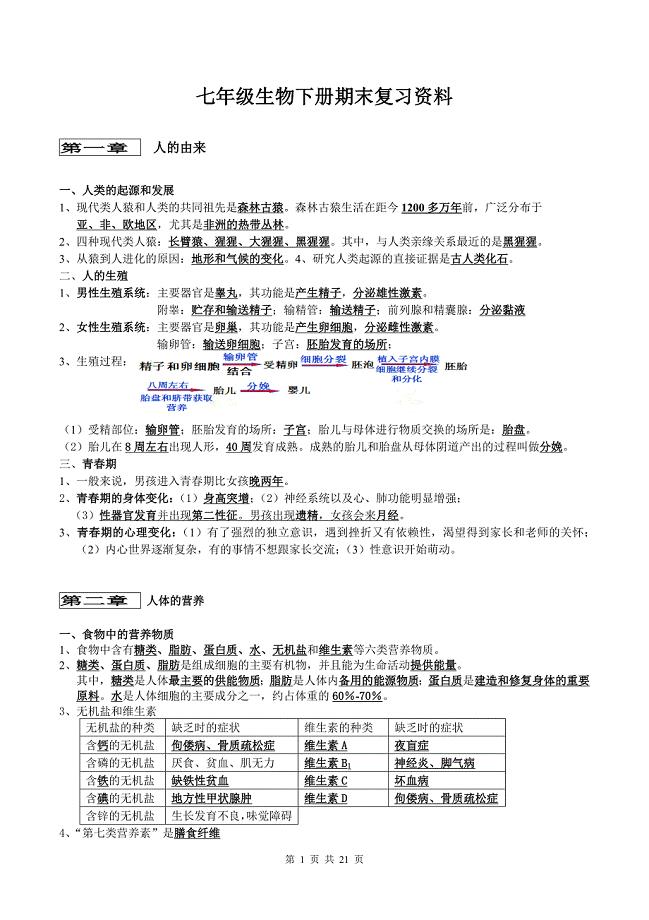
初中人教版七年级上册下册全册生物复习提纲21页 (1)
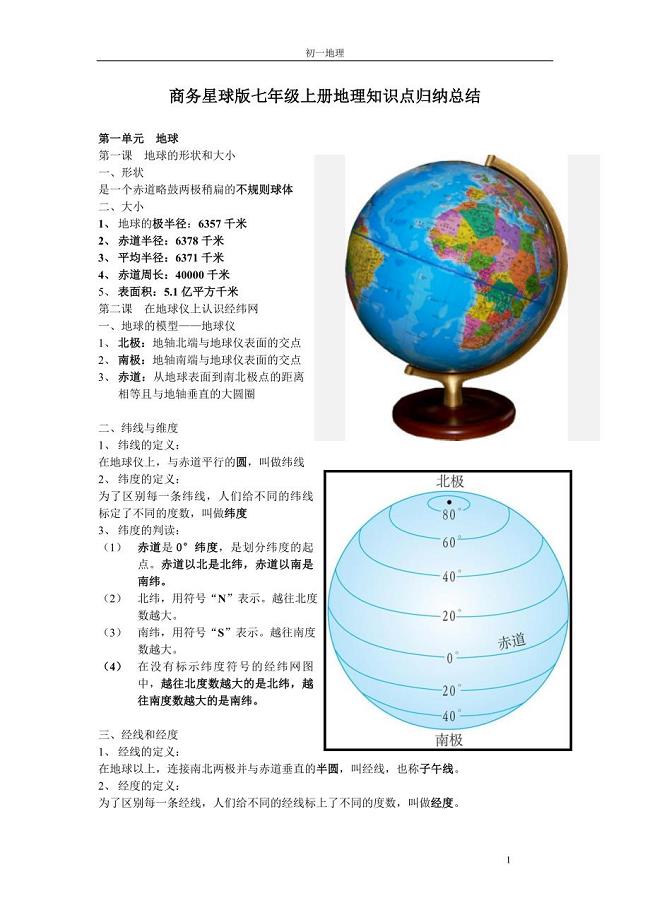
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页
2023年北京市西城区八年级(下)期末语文试卷【含答案】
2024-04-23 16页
江苏省南京市2024年中考数学模拟题【含答案】
2024-04-23 18页
上海市奉贤区2024届高三二模语文试题【含答案】
2024-04-23 8页
统编版小学语文六年级下册第四单元知识小结
2024-04-23 11页