
二阶系统串联校正的根轨迹
47页
1、重庆邮电大学移通学院本科毕业设计(论文)编 号:_审定成绩:_ 毕 业 设 计 (论 文)设计(论文)题目:_ _单 位(系别):_学 生 姓 名:_专 业:_班 级:_学 号:_指 导 教 师:_答辩组负责人:_填表时间: 20 年 月重庆邮电大学移通学院教务处IV摘 要对于一个系统,首要的要求就是系统的绝对稳定性。在系统稳定的情况下,要求系统的动态性能和稳态性能要好,这些可以通过设计校正来达到期望的性能标准。本文用劳斯判据判断系统的稳定性,用根轨迹法改造系统的根轨迹,使系统达到要求的性能指标。从根轨迹图可以看出,只调整增益往往不能获得所希望的性能。通过增加新的(或者消去原有的)开环零点或者开环极点来改变原根轨迹的走向,得到新的闭环极点,从而使系统可以实现给定的性能指标来达到系统的设计要求。本文对原系统采用串联校正的方法改善系统的性能指标,其步骤如下: 1.作原系统的根轨迹图,并根据动态期望指标推出满足条件的、。 2.检验动态性能。计算出主导极点,分析开环增益。 3.检验稳态性能。计算开环增益,判断校正方式。 4.计算校正装置,设置校正装置并检验。 5.作校正后的根轨迹图,判断校正后
2、的系统性能。最终使系统在输入为时的静态指标0.2,同时使动态期望指标 5%; 5 sec。并且用MATLAB对原系统和校正后的系统分别进行仿真,对比其根轨迹以及在指定输入下的输出,分析其是否达到要求。【关键词】根轨迹法 串联校正 MALTAB仿真 动态性能 稳态性能ABSTRACTFor a system, the first requirement is that the absolute stability of the system. Under the stability of the system, the requirements of the system dynamic performance and steady-state performance is better, they can achieve the desired performance standards by designing correction. In this paper, Rolls criterion to judge the system stability, root locus me
3、thod using root locus transformation of the system, allowing the system to achieve the performance required. Can be seen from the root locus, often can not only adjust the gain to obtain the desired properties. By adding new (or eliminate the original) open-loop or open-loop pole zero change to the original root locus, get new closed-loop poles, so that the system can achieve a given performance indicators to meet the design requirements of the system.In this paper, the system uses a series of o
4、riginal calibration method to improve system performance, the following steps: 1. The root locus for the original system, and introduced to meet the conditions of the dynamic expectations index. 2. Verify that the dynamic performance. Calculate the dominant pole, analyze open-loop gain. 3. Verify that the steady-state performance. Open-loop gain is calculated to determine the correction mode. 4. Calculate the correction means, the correction means and test set. 5. corrected for root locus determ
《二阶系统串联校正的根轨迹》由会员jiups****uk12分享,可在线阅读,更多相关《二阶系统串联校正的根轨迹》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
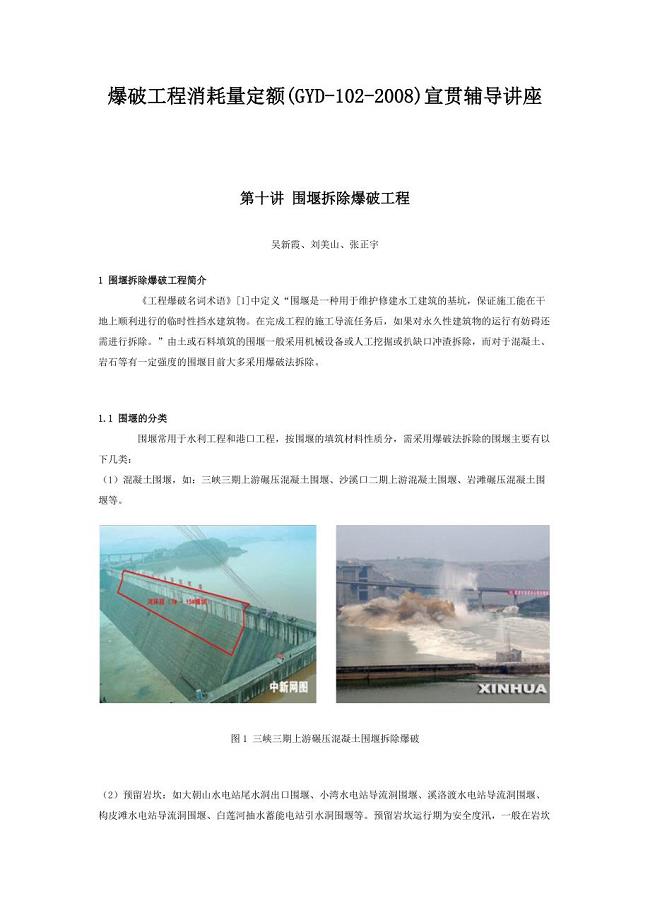
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
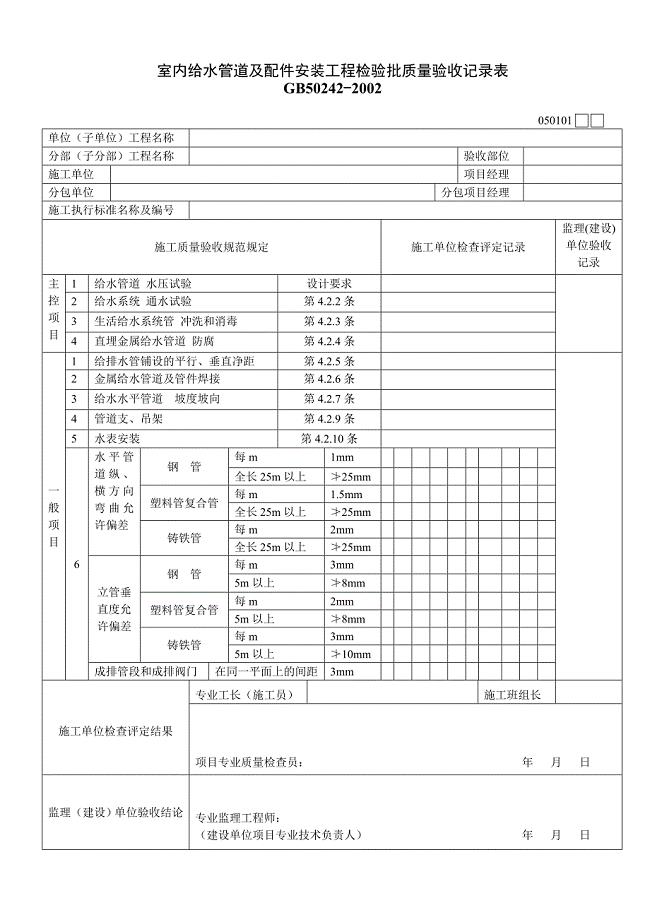
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页
广东省建筑装饰工程竣工验收技术资料统一用表水基防锈剂配方组成比例,防锈原理及配制方法辩论赛宁要大城市一张床,宁要小城镇一间房【2018年整理】动力气象吕美仲课后答案.pdf红楼梦后28回(癸酉本)金锄头网企业认证授权书(负责人非法人必须提供)服装设计助理实习周记制造机械项目投资分析报告(总投资15000万元)(78亩)计算机网络技术基础 教学课件 作者 阚宝朋 课件 第2章 网络体系结构与网络协议计算机网络技术基础 教学课件 作者 阚宝朋 课件 第5章 网络层与网络互联计算机网络技术基础 教学课件 作者 阚宝朋 课件 第1章 网络基础知识输煤管道生产建设项目可行性研究报告