
上下料机器人设计
27页
1、上下料机器人设计摘要:主要介绍基于plc和机械结构的针对于自动化机床和工业梁用的机械人。简述了工业机械人的现状的发展现状及前景,及其主要的发展方向和用途。发达国家的使用经验表明:使用工业机器人可以降低废品率和产品成本,提高了机床的利用率,降低了工人误操作带来的残次零件风险等,其带来的一系列效益也是十分明显的,例如减少人工用量、减少机床损耗、加快技术创新速度、提高企业竞争力等关键词:机床上下料,自动化,plc,工业机器人机器人的自平衡控制系统机器人的自平衡系统在各行各业具有广泛的应用,而轮式移动自平衡机器人由于具有结构简单、可控性强、成本低等优点,成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也就是说,自平衡机器人在静止状态下,不能保持平衡,车体总是要向前或向后倾倒;而在运动状态下,可以通过一定的控制策略使它达到动态平衡一 。由于自平衡系统具有内在不稳定性和结构灵活性,国内外机器人爱好者设计了多种结构、外观各异的自平衡机器人,尝试采用各种控制策略使其达到自平衡控制。通常这类机器人采用姿态传感器检测机器人车体的倾倒角度和倾倒角速度,根据当前机器
2、人姿态控制伺服电机驱动电压的转向和转速,从而使机器人保持平衡。该方式制作的自平衡机器人虽然控制性能良好,但成本高,不适合广泛推广。本文设计的机器人尝试采用红外测距传感器测量车体与地面的距离,通过计算获取机器人的姿态信息,进而实现机器人的自平衡 。系统结构自平衡机器人系统主要由机械行走装置、控制系统和传感器3部分组成,机械行走装置主要由车体平台、电机驱动器、直流无刷电机、齿轮减速机构和车轮组成。机器人采用48 V电池供电,通过DC-DC模块转换为5 V和24 V 电压。其中,5 V提供给控制系统和传感器,24 V提供给电机驱动器。控制系统以ATmegal28单片机为主控制芯片,通过SJA1000扩展CAN总线与电机驱动器通信。红外测距传感器的输出是与距离成正比的模拟电压值,输入到单片机的AD采样端口进行处理从而得到距离信息。机器人的系统结构框图如图2所示。图2 机器人系统结构框图姿态信息获取机器人的姿态信息包括倾倒的图3所示,机器人左右两侧水平位置各安装有1个红外测距传感器,可以测量与地面之间的距离d 和d 。当机器人在竖直状态时,左右传感器距离差为零。当机器人倾倒时,距离差与倾倒角度
3、成函数关系如下: 图3 传感器设置位置简图sin 0一(d2一d1)D其中,D为传感器之问的距离。机器人在竖直动态控制时倾倒角度范围较小,此时sin0-0,即可由传感器的距离信息得到机器人的倾倒角度。角速度可以通过 对时间求导获得。选用的红外测距传感器为Sharp公司的GP2D1 2,输出为0424 V的模拟信号,对应的测量距离为1O80 cm。在同一温度下,传感器的输出与测量结果呈良好的线性关系,可以满足自平衡机器人的要求。3 控制系统设计31 机器人平衡控制原理当车体偏离平衡位置(竖直位置)向前倾斜时,传感器采集信息并传送到单片机进行计算和判断,车轮随之作出响应向前运动,将车体向平衡位置调整;同样当车体向后倾斜时,车轮将向后运动。这样机器人一直处在倾斜判断、运动调整的动态过程中,使车体始终保持在平衡位置附近,达到一种动态平衡。32 控制系统硬件设计控制系统主芯片选用Atmel公司基于RISC结构的8位单片机ATmegal28。它采用低功耗CMOS工艺;具有丰富的片上资源,包括4个定时器、4 KB的数据SRAM、l28 KB的程序Flash、可外扩至64 KB的E PROM 和8个1
4、O位ADC通道;拥有UART、SPI、I。C、JTAG接口,方便外部扩展和传感器的接入一 。321 传感信息输入电路传感器信号通过放大器引入,通过设置反馈电阻(R1和R2)和输出端电阻(R3和R4)的阻值可以使输入的电压值在要求的范围内。具体硬件电路如图4所示。322 扩展CAN通信电路单片机与电机控制器采用CAN e2,线通信,CAN接口采用Philips公司的CAN 物理层和链路层接口芯片SJA1000和PCA82C250。单片机直接控制SJA1000的ADOAD7、ALE、INT引脚。SJA1000工作在Intel模式下,MODE脚接高电平,片选脚CS接地,始终处于选通状态。扩展CAN通信电路如图5所示。单片机对SJA1000的操作主要是对寄存器的操作:一方面,对SJA1000的模式寄存器、命令寄存器、状态寄存器、中断寄存器、中断允许寄存器、总线定时寄存器、输出控制寄存器、时钟分频计数器进行设置和检测;另一方面,对收发缓冲区进行读写,从而和CAN设备交换数据。图5 扩展CAN通信电路 控制系统软件设计自平衡机器人的控制系统需要实现以下功能:传感器信息处理和机器人姿态信息计算,电机
《上下料机器人设计》由会员206****923分享,可在线阅读,更多相关《上下料机器人设计》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
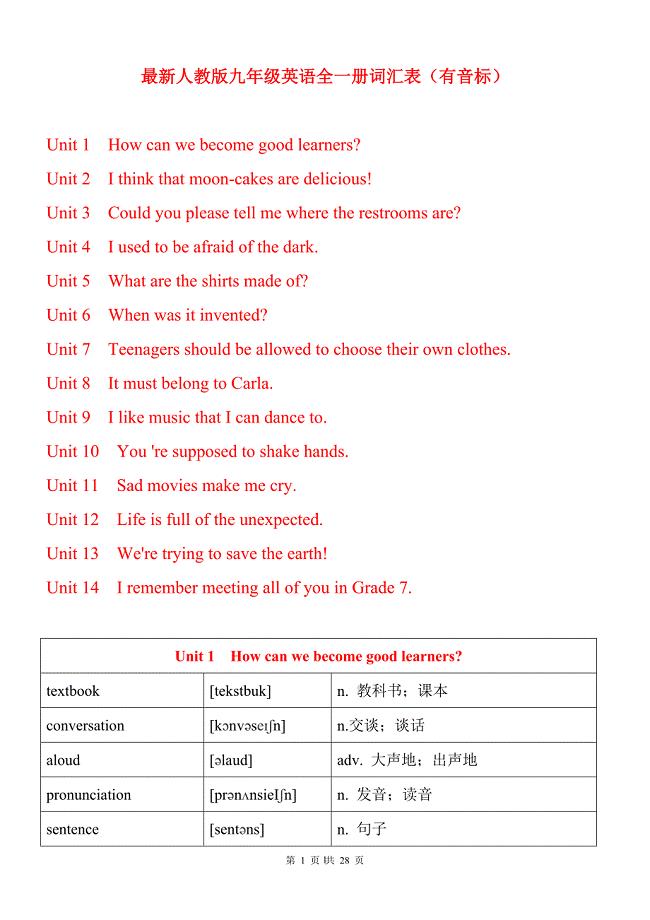
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
初中人教版七年级上册下册全册生物复习提纲21页 (1)
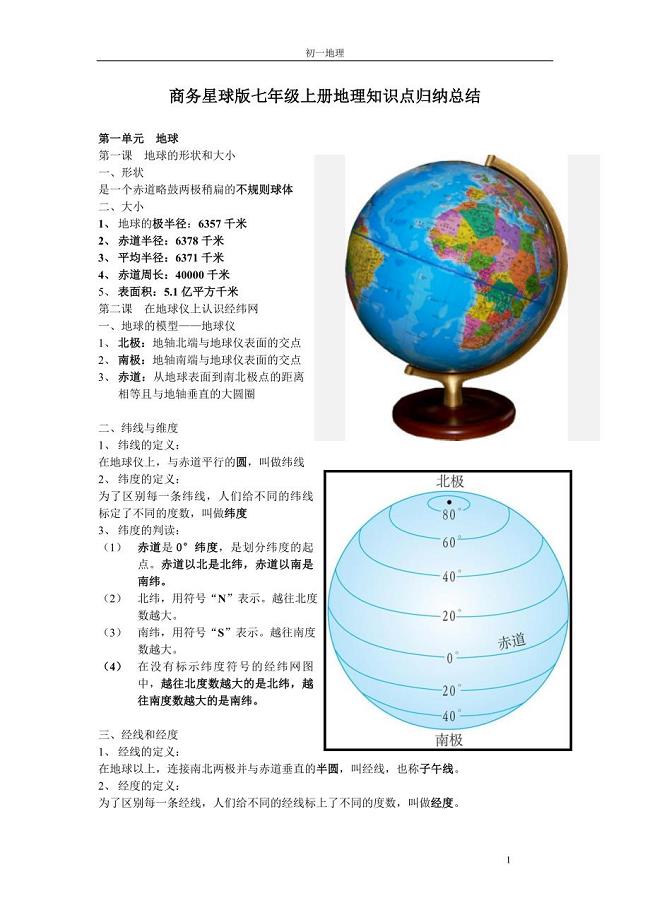
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页