
gps 卫星定位 基本原理
9页
1、GPS 卫星定位基本原理一.概述GPS卫星定位基本原理:卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置,三维方向以及运动速度和时间信息。实际上是将卫星作为动态空间已知点,利用距离交会的原理确定接收机的三维位置。GPS定位的各种常用的观测量:1)L1载波相位观测值2)L2载波相位观测值3)调制在L1上的C/A-code伪距4)调制在L2上的P-code伪距5)Dopple观测值GPS定位的分类:1)按定位方式,GPS定位分为单点定位和相对定位(差分定位)。单点定位就是根据一台接收机的观测数据来确定接收机位置的方式,它只能采用伪距观测量,可用于车船等的概略导航定位。相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,它既可采用伪距观测量也可采用相位观测量,大地测量或工程测量均应采用相位观测值进行相对定位。2)按接收机的运动状态,可分为动态定位、静态定位。在定位观测时,若接收机相对于地球表面运动,则称为动态定位;在定位观测时,若接收机相对于地球表面静止,则称为静态定位。二.伪距测量伪距定义:GPS接收机对测距码的量
2、测就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为伪距。对C/A码测得的伪距称为C/A码伪距,精度约为20米左右,对P码测得的伪距称为P码伪距,精度约为2米左右。(一)伪距测量1.如何进行伪距测量伪距测量的其本方法:1)接收机至卫星的距离借助于卫星发射的码信号量测并计算得到的;2)接收机本身按同一公式复制码信号;3)比较本机码信号及到达的码信号确定传播延迟的时间t;4)延迟时间乘以光速就是距离观测值D=C?t。(1)为什么要用码相关法来测定伪距利用码相关技术在自相关系数R()=max的情况下来确定信号的传播时间,实际上就是根据参加比对的n个码来共同确定传播时间。自相关系数最大就意味着从总体上讲这两组测距码已对得尽可能的齐了。在这种情况下测定的传播时间,从某种意义上讲就是用n个标志测定的信号传播时间的平均值。这样可以大幅度地消除各种随机误差的影响,从而大大提高测定精度。(2)自相关系数的测定方法测定自相关系数R()的工作由接收机锁相环路中的相关器和积分器来完成。自相关系数R()可以用下式来表示:其测量原理如图:(二)伪距定位观测方程伪距定位基本观测方程:考虑电
3、离层、对流层、钟差影响有:卫星与接收机之间的几何距离为:式中:(X,Y,Z)为接收机坐标,(Xs,Ys,Zs)为卫星坐标。如果将接收机钟差也作为未知数,则连同接收机坐标共有四个未知数,则伪距定位的观测方程为:j为卫星数,j=1,2,3,三.载波相位测量定义:载波相位观测值:载波相位应被称为载波拍频相位,它是收到的受多普勒频移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。整周模糊度:可记录下相位的变化值,但开始观测时的接收机和卫星振荡器的相位初值是不知道的,起始历元的相位整数也是不知道的,即整周模糊度。(一)载波相位测量原理载波信号量测精度优于波长的1/100,载波波长(L1=19cm,L2=24cm)比C/A码波长(C/A=293m)短得多,所以GPS测量采用载波相位观测值可以获得比伪距(C/A码或P码)定位高得多的成果精度。(二)载波相位测量的观测方程载波相位基本观测方程:考虑电离层、对流层、钟差影响有:(三)整周跳变修复整周跳变:卫星信号被障碍物挡住而暂时中断,或受无线电信号干扰造成失锁,计数器无法连续计数,当信号重新被跟踪后,使整周计数不正确,但不到一整周的相位观测值仍
4、是正确的。这种现象称为周跳。整周跳变的探测与修复常用的方法有下列几种:1.屏幕扫描法此种方法是由作业人员在计算机屏幕前依次对每个站、每个时段、每个卫星的相位观测值变化率的图像进行逐段检查,观测其变化率是否连续。如果出现不规则的突然变化时,就说明在相应的相位观测中出现了整周跳变现象。然后用手工编辑的方法逐点、逐段修复。2.用高次差或多项式拟合法此种方法是根据有周跳现象的发生将会破坏载波相位测量的观测值Int()+随时间而有规律变化的特性来探测的。整周计数每秒钟可变化数千周,那么对于几十周的跳变就不易发现。但如果在相邻的两个观测值间依次求差而求得观测值的一次差的话,这些一次差的变化就要小得多。在一次差的基础上再求二次差,三次差、四次差、五次差时,其变化就小的更多了。此时就能发现有周跳现象的时段来。四次、五次差已趋近于零。由于振荡器的随机误差而给相邻的L1载波相位造成的影响为2.4周,所以用求差的方法一般难以探测出只有几周的小周跳。通常也采用曲线拟合的方法进行计算。根据几个相位测量观测值拟合一个n阶多项式,据此多项式来预估下一个观测值并与实测值比较,从而来发现周跳并修正整周计数。3.在卫星间
《gps 卫星定位 基本原理》由会员小**分享,可在线阅读,更多相关《gps 卫星定位 基本原理》请在金锄头文库上搜索。
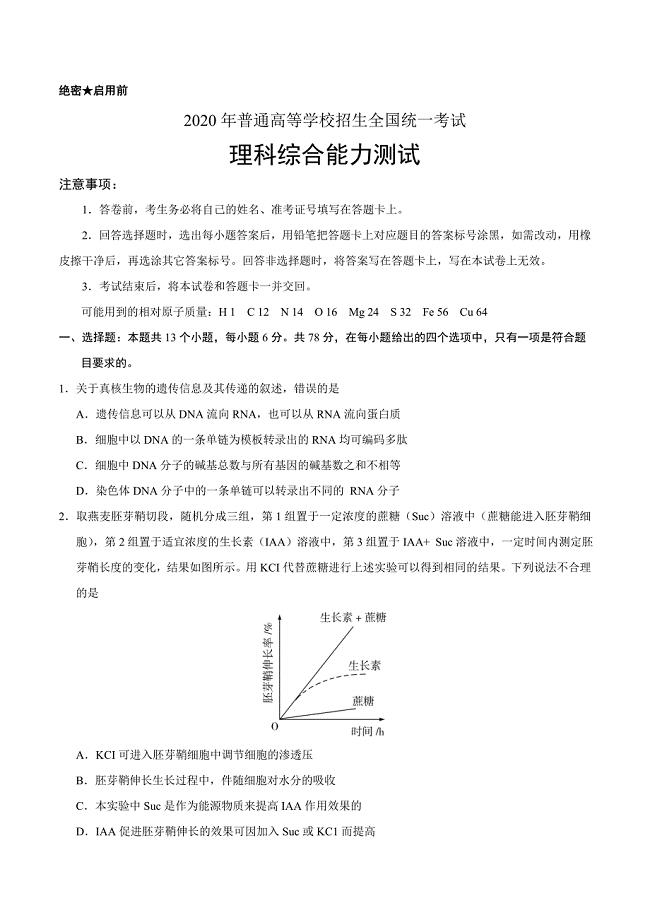
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页