
a320飞机 惯性 导航 系统 校准分析与维护
6页
1、A320飞机惯性导航系统校准分析与维护惯性导航是指利用惯性敏感元件测量航行体相对于惯性空间的线运动和角运动参数,在给定初始条件的情况下,由计算机推算出航行体的姿态、方位、速度、位置等导航参数,以引导航行体完成预定航行任务。这种建立在牛顿力学基础上的导航方法不依赖于任何外界信息,不受自然或人为因素的干扰,具有很好的隐蔽性,在航海、航空、航天等领域得到了广泛应用。惯性导航由于采用积分计算,其定位误差随时间而积累。目前普遍采用将惯性导航与其他种类的导航相组合的办法,这种组合能取各种导航方法之长,大大提高导航系统整体的定位精度和性能,是一种较为理想的导航方式。我公司执管A320系列飞机采用惯性导航、无线电导航或惯性导航、卫星导航的组合导航方式,其中惯性导航系统采用捷联式惯性导航系统。系统的核心部件为三个惯性基准组件(IR),每个惯性基准组件已与相应的大气数据基准组件(ADR)组合在一起,称为大气数据惯性基准组件(ADIRU)。每个IR内均有三个激光陀螺和三个加速度计,分别用来测量绕飞机三轴的角加速度和沿飞机三轴的线加速度,测得的加速度信号经微处理器计算后,可以得到飞机各种各样的导航参数,这些参
2、数一方面在各种显示仪表上显示,供飞行人员使用,另一方面传送至其他许多系统和设备,以完成特定的功能。每套惯性导航系统均有两种工作方式,导航方式和姿态方式。导航方式是系统的正常工作方式,系统能提供全部的导航参数;姿态方式是系统导航计算功能失效后的减精度工作方式,此时系统仅能提供飞机的姿态和航向信息。惯性导航系统进入导航工作方式前,必须进行校准。这是因为惯导系统采用的是积分计算,在进行计算前,系统必须知道飞机的初始状态。在校准过程中,系统寻找飞机所在处的地垂线,并确定当地的真北方位,从而获得飞机的初始姿态和初始方位信息。惯性导航系统通常有两种校准方式,正常校准和快速校准(又称反转校准)。正常校准飞机停在地面通电后,将惯导控制显示组件(CDU)上方式选择旋钮从OFF(关)位拔出置NAV(导航)位,系统在进行5秒钟的电瓶测试后即进入正常校准,CDU上校准(ALIGN)灯稳定地亮,飞机中央电子监控(ECAM)上显示屏显示IRSINALIGN7信息。此时,ADR提供的计算空速(CAS)、垂直速度(V/S)和气压高度(ALT)数据在正、副驾驶员位主飞行显示器(PFD)上显示。惯性导航系统的正常校准一般
3、需10分钟,校准过程主要分为三个阶段;1.水平粗校准正常校准的头30秒为水平粗校准阶段,主要利用加速度计测量飞机的姿态角,即俯仰角和倾斜角。(1)利用纵向加速度计测量飞机的俯仰角飞机停在地面上,俯仰角为、倾斜角为0时,虽然沿飞机纵轴方向没有线加速度,但纵向加速度计壳体随飞机纵轴俯仰了角,此时加速度计的质量摆敏感到了重力加速度g的分量gsin?输出信号Uy则Uy=Kygsin(Ky为纵向加速度计比例系数)当俯仰角很小时,sin(单位为弧度)。=Uy/(Kyg)(2)利用横向加速度计测量飞机的倾斜角与上同理,飞机停在地面上,倾斜角为、俯仰角为0时,重力加速度g沿飞机横轴的分量gsin被横向加速度计敏感到,输出信号Ux则Ux=Kxgsin(Kx为横向加速度计比例系数)。当倾斜角很小时,sin(单位为弧度)。=Ux/(Kxg)当飞机既有俯仰又有倾斜时,用上述公式测得的俯仰角为飞机真实俯仰角,测得的倾斜角为飞机非真实倾斜角(真实俯仰角为飞机纵轴与水平面之间的夹角,非真实倾斜角为飞机横轴与水平面之间的夹角)。30秒后,飞机的俯仰角和倾斜角被计算出来,正、副驾驶位的PFD上姿态旗消失,飞机符号及空地
4、球出现,俯仰、倾斜刻度及指示被显示。2.陀螺-罗盘(或方位角)处理及水平精校准此阶段至少需要9分30秒,主要用于测量飞机的真航向角,并使用地球自转角速度的垂直分量计算出飞机所在处的纬度。(1)真航向角的测定假定飞机停在地面上,俯仰角、倾斜角均为0,真航向角为,飞机所在处纬度为。由于飞机停在地面上,随地球一起自转,其自转角速度等于地球自转角速度e(e为15度/小时),e在飞机所在处水平面上的水平分量ecos?在当地地垂线上的垂直分量为esin。水平分量ecos又可以分解为沿飞机纵轴的分量ecoscos和沿飞机横轴的分量ecossin?这二个分量分别被纵向陀螺及横向陀螺所敏感,输出信号Vy和Vx则Vy=Lyy=LyecoscosVx=Lxx=Lxecossin(Ly为纵向陀螺比例系数、Lx为横向陀螺比例系数)。Vx/Vy=Lx/Lytg=arctg(VxLy)/(VyLx)(2)飞机所在处纬度的测定由上可知,垂直分量esin可被垂直陀螺敏感到,输出信号VZ则VZ=LZesin(LZ为垂直陀螺比例系数)cal=arcsinVZ/(LZ.e)考虑到飞机停放时,、不一定为零,故上述所得、cal为
《a320飞机 惯性 导航 系统 校准分析与维护》由会员小**分享,可在线阅读,更多相关《a320飞机 惯性 导航 系统 校准分析与维护》请在金锄头文库上搜索。
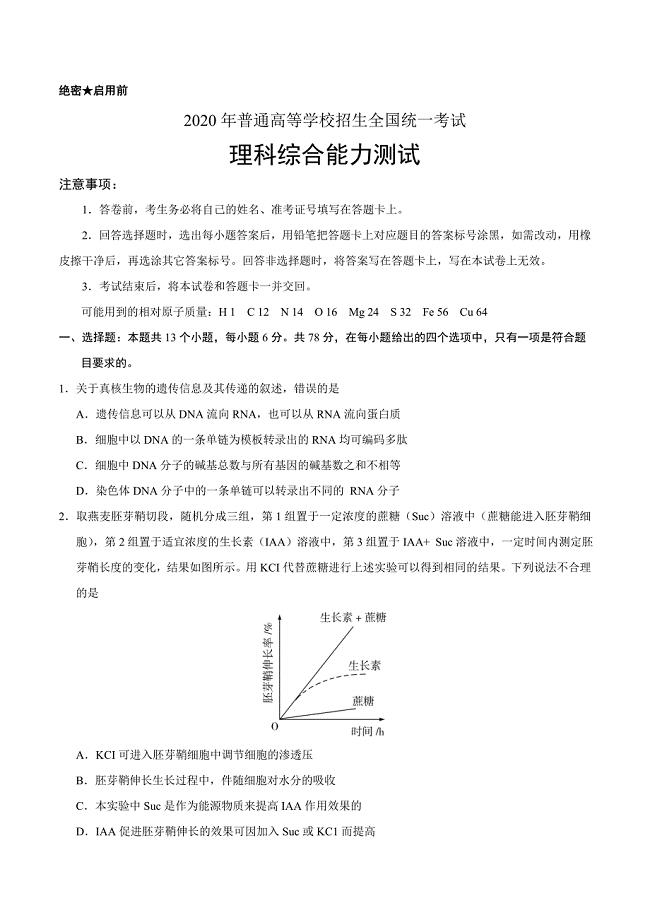
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页