
中鸣机器人教育套装使用指南2012.11.02.pdf
31页
1、中鸣机器人教育套装使用指南 钟 毅 一、认识硬件一、认识硬件 1、机器人的积木件、机器人的积木件 1.1 积木的分类积木的分类 3、5、7、9、11、15 直梁 拐角梁 双向衔接件 转角点衔接件 齿轮 滑轮、轴连接件 板件 链接轴 1.2 积木的衔接积木的衔接 1.2.1 梁和梁的链接 1.2.2 板和梁、板和板的链接 1.3 齿轮、齿轮比、齿条 两级齿轮减速 齿轮比 5:1 齿轮比 5:2 齿轮比 2:1 直传递 1:1 直角传递 1:1 反向 1:1 同向 1:1 1:1 齿条 1.4 马达和轮子的链接马达和轮子的链接 1.5 积木的分类积木的分类 积木按照颜色和类型进行分类入格示意图 控制器、传感器、马达、连接线、下载线入格示意图 2、认识控制器、认识控制器 2.1 控制器外观 E2-RCU 控制器是中鸣教育机器人的大脑,它有 2.4 寸彩色触屏、电源开关键(Power) 、 两个自定义功能按键(下载按键、运行按键) 、8 路传感器端口(P1-P8) 、4 路马达专用端口 (M1-M4) 、一个 USB 下载接口及一个外接 DC 电源接口。 端口 P1-P8:可以任意链接总共最多
2、 8 路光电传感器、触碰传感器、彩灯链接,所有传 感器默认接 P1 端口,也可以自定义设置接 P2-P8 其他端口。 端口 M1-M4:可以任意链接总共最多 4 路马达,所有马达默认接 M1 端口。当机器人由两 个马达驱动时,M1 端口链接左驱动马达,M2 端口链接右驱动马达。 :彩色显示触摸屏 :P1-P8 传感器接口 :内置音量采集口 :M1-M4 马达接口 :下载(Download)按键 :电源开关按键 :运行(Run)按键 :USB 下载接口 :外接 DC 电源接口 :运行提示灯 2.2 安装电池 拆开电池后盖 按电池+-极方向安装电池 盖上电池后盖 2.3 端口接线于拔线 传感器接口 接线 马达接口 接线 接线端口拔线 2.4 控制器系统菜单 电源按钮:1、完全按下打开或关闭控制器电源 ;2、轻轻半按电源按钮,重启控制器。 控制器菜单界面 :菜单名称:当前选择的菜 单名称。 :电源电压提示:当前电池 电压。 :功能选择按钮:不同菜单 内功能按钮各有不同。 : 菜单选择按钮:系统应用、 内置测试、 修改数据、 系统 设置菜单选择。 系统应用菜单 内置测试菜单 修改数据菜单 系统
3、设置菜单 系统应用:系统应用:运行下载的程序、选择要运行的程序、无线下载程序、USB 下载程序功能。 内置测试:内置测试:各类内置设备及外接设备的状态或数据的测试。 修改数据:修改数据:手动修改控制器内数据存储的数值。 系统设置:系统设置:设置系统语言、查看系统信息、重置磁盘的功能。 2.5 内置音量传感器测试 开机选择【内置测试】 触屏选择【音量】 进入音量测试功能 双手击掌获取当时音量最大及最小值 *点击【清零】按钮可将最大值最小值及当前值全部清零,音量检测从新测试, 【退出】 结束音量测试 2.6 修改数据 E2 控制器提供 200 个内置存储数据功能,支持在控制器进行数据的修改,也可以通 过软件读取数据或者保存数据。 触屏选择【修改数据】 进入数据修改菜单 点击数据示意条进行数据修改 选定后,编号及数值变绿色为修改状态 数据修改完成后效果示意 数据的编号 上翻页、下翻页 数据的数值 数据示意条 点编号,数值-100 点数值,数值+100 点左,-1;点右,+1。 退出数据修改 2.7 系统设置 【系统设置】菜单 选择控制器菜单语言 重置磁盘,删除所有存储程序 查看控制器固件版本
4、 3、彩灯 3.1 外观 彩灯标签 彩灯接线口 彩灯积木接口 3.2 搭建方式 3.3 彩灯功能测试 3.3.1 彩灯自动测试 开机选择【内置测试】 触屏选择【彩灯】 彩灯开始自动换色 3.3.2 彩灯手动测试 触屏选择【手动】 点击【切换】 点击【切换】换色 * 每点击一次切换,就切换一个颜色,顺序为:关闭-红绿蓝黄洋红洋青白。 4、马达 4.1 外观 马达标签 马达接线端口 马达积木接口 4.2 搭建方式 4.3 马达功能测试 4.3.1 自动马达状态测试:所有马达端口输出一致的速度,由 0-100 逐渐增大,再由 100 至 0 速度减小,0 至-100 为反向,速度逐渐增大,-100 至 0 为反向,速度逐渐减小。 点击【马达】按钮 马达自动测试 4.3.2 手动测试马达:单独设置各端口马达速度、转向、转向切换。 4.3.2 马达编码器测试:测试马达内置编码器的数值, 数值为旋转量, “-”为逆转向。 马达端口编号 手动测试马达 马达实时速度 马达转向切换 马达速度示意条 点击速度递减 点击速度递增 点击切换转向 端口编号 端口编码器数值 清零所有端口数值 5、触碰传感器 5.
《中鸣机器人教育套装使用指南2012.11.02.pdf》由会员小**分享,可在线阅读,更多相关《中鸣机器人教育套装使用指南2012.11.02.pdf》请在金锄头文库上搜索。
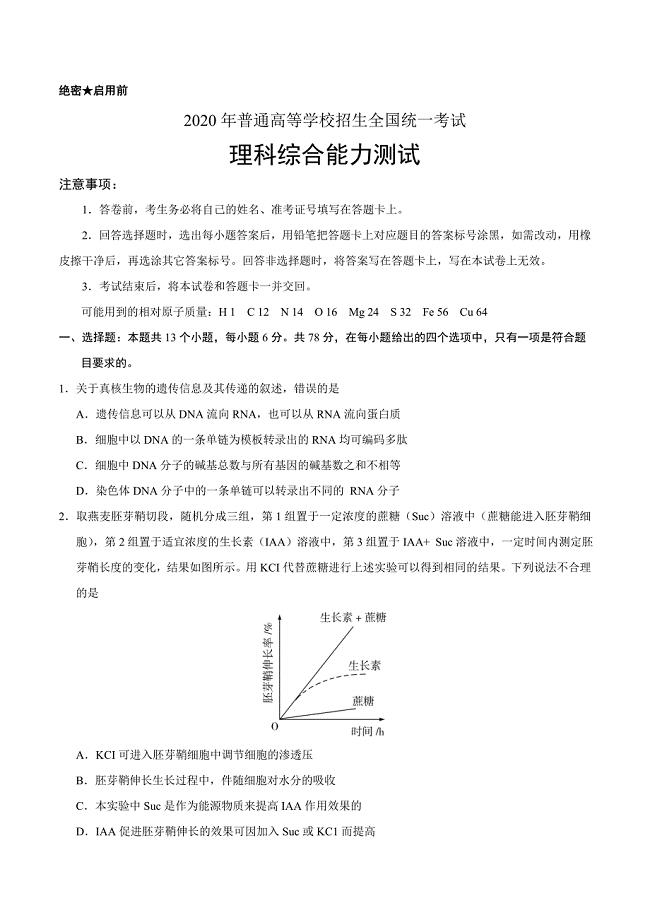
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页