
kuka机器人KRC2系统操作与编程手册
58页
1、一、安全51.1 责任61.2选用61.3 安全标示61.4 一般安全规定61.5关于营运者和操作者的特别安全措施71.6 六轴机器人的死点81.7 机器人系统的安全要素:工作空间的限制81.8 机器人系统的安全要素:温度监控91.9 机器人系统的安全要素:试运行模式91.10 机器人的安全要素:使能按键91.11 机器人轴的松开装置91.12规划和结构:安全和工作空间101.13安装与操作101.14安装与操作:安装的安全111.15安全标记111.16 KUKA 培训的安全指导121.17 受静电威胁的组件的处理13二、用户控制 & 导航142.1 系统概述142.1.1 KR C2 的技术数据142.1.2 KR C2 的PC 主机箱142.1.3 PC- KR C2 PC 接口142.1.4 机器人上的序列号152.1.5 控制柜上的序列号152.1.6 软件152.1.7 用户组162.2 基本术语162.2.1 KUKA 机器人系统的构成162.2.2 KUKA 示教器(KCP)162.2.3 机器人类型命名172.2.4 KUKA 机器人的机械结构172.2.5 KUKA
2、 机器人轴的命名182.2.6 KUKA 机器人的工作范围(侧视图)182.2.7 KUKA 机器人的工作范围(俯视图)182.2.8 KUKA 机器人的载荷分配192.2.9 KUKA 机器人上的负载 (标准系列)192.2.10 KR 125/2 的有效载荷表192.3 示教器202.3.1 KUKA 示教器 (KCP)202.3.2 模式选择开关202.3.3 模式列表202.3.4 示教器窗口操作212.3.5 窗口显示212.3.6窗口选择键212.3.7软按键222.3.8 状态窗口222.3.9消息窗口222.3.10消息类型222.3.11 示教器运行程序232.3.12 数字小键盘232.3.13 ASCII 字母键盘242.3.14 光标/回车242.3.15 菜单键252.3.16 状态键252.3.17 状态栏252.3.18 状态栏262.4用户模式导航262.4.1 导航262.4.2 导航中的图表262.4.3 用键盘导航272.4.4 新建程序272.4.5 编程状态272.4.6 存档272.4.7 存档所有282.4.8 存档单个程序282.4.9
3、恢复所有282.4.10 恢复单个程序292.5专家模式导航292.5.1 导航 (专家)292.5.2导航中的附加图标 (专家)292.5.3 创建一个新模块 (专家)302.5.4 错误显示302.5.5 错误列表30三、校零313.1为什么要校零313.2 校零装置313.3 量具筒横截面313.4 控制运行过程示意323.5 重新校零的原因323.6 用EMT 进行轴的校正323.7 为EMT校正做准备33四、坐标系344.1轴的精确移动344.1.1 手动使轴精确运动344.1.2 用空间鼠标使轴精确运动344.2 全局坐标系344.2.1 全局坐标系344.2.2 直角坐标系中旋转角的分配344.2.3 右手法则 (坐标系方向)354.2.4 右手法则 (坐标系方向)354.2.5 用空间鼠标控制的笛卡儿(直角)坐标系中的运动354.3 工具坐标系354.4 基坐标系35五、TCP(工具中心点)标定365.1 TCP 标定365.2 TCP 标定的一般程序365.3 TCP(工具中心点)标定方法365.3.1 TCP 定标法365.3.2 方位定标法375.3.4 激活工具
4、375.3.5 X Y Z 4 点法37六、基坐标系的标定386.1 工件标定386.2工件标定的目的386.3 3点法396.4 间接计算基坐标系396.5 激活基坐标系39七、移动规划407.1 点到点(PTP)移动407.1.1 PTP (点到点)移动最快407.1.2 同步点到点407.1.3 规划一个PTP(点到点)移动417.1.4规划一个PTP(点到点)移动417.1.5规划一个PTP(点到点)移动417.2 直线LIN 移动417.2.1线移动不需逼近定位417.2.2速度变化图427.2.3 规划一个直线移动427.2.4 直线移动的编程427.2.5 规划一个直线移动427.3 圆形(CIRC) 移动437.4 轨迹逼近447.4.1移动中的轨迹逼近447.4.2 通过轨迹逼近缩短周期时间447.4.3 有轨迹逼近的点到点移动447.4.4 有轨迹逼近的直线移动447.4.5 有轨迹逼近的圆形移动45八、逻辑编程478.1逻辑编程478.2有用的逻辑命令478.3和时间相关的等待功能478.4与信号相关的等待功能488.5 开关功能488.6 简单脉冲功能508.7
《kuka机器人KRC2系统操作与编程手册》由会员jiups****uk12分享,可在线阅读,更多相关《kuka机器人KRC2系统操作与编程手册》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
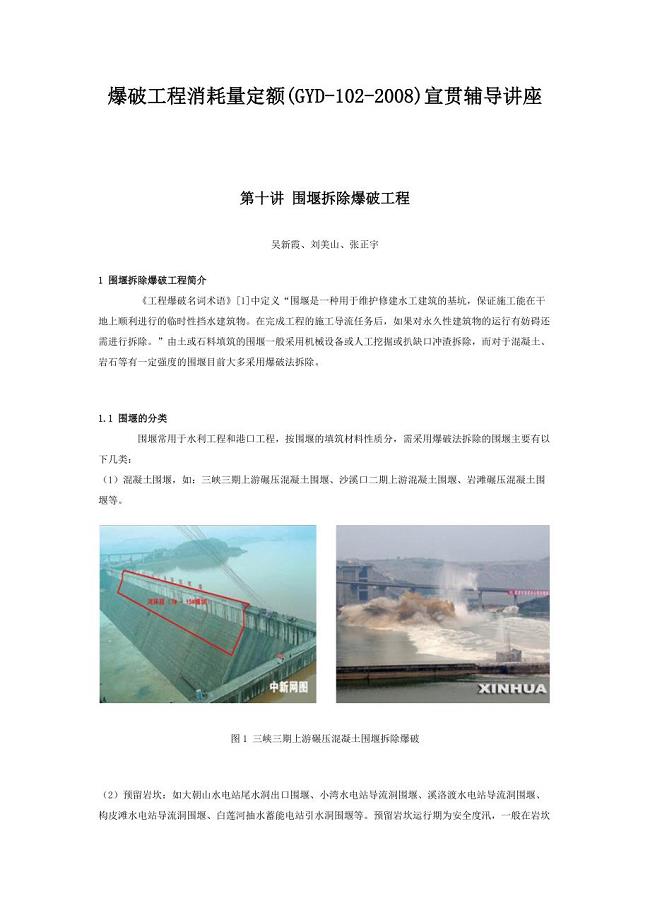
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
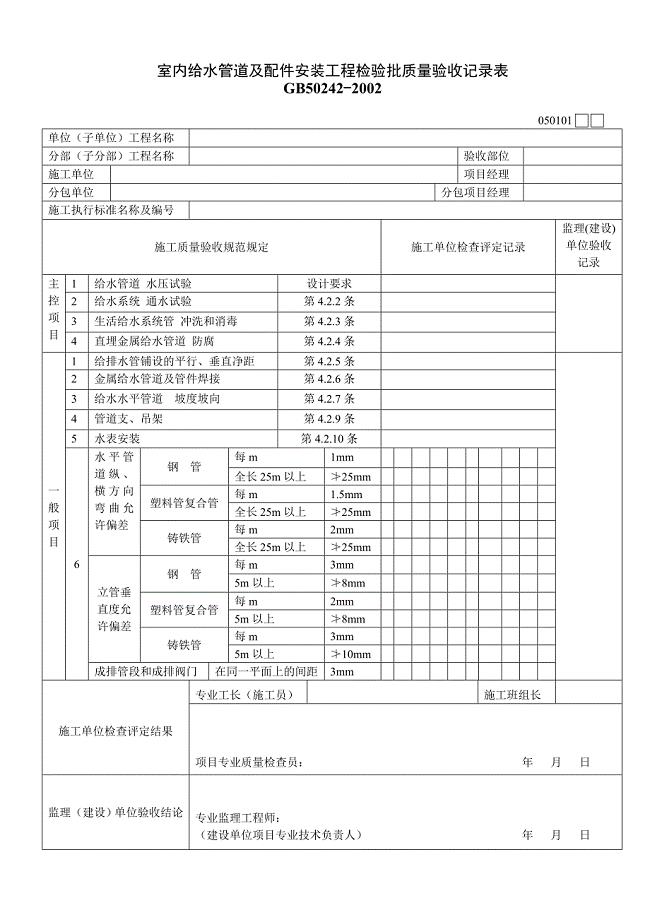
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 小数数学题:简便计算11道练习题及参考答案A10
小数数学题:简便计算11道练习题及参考答案A10
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A7
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A3
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A5
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A9
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A6
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A8
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A1
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A4
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A2
2024-04-17 2页