
02240机械工程控制基础
5页
1、02240机械工程控制基础第一章 绪论1.1 控制理论的发展简史(了解)1.2 机械工程控制论的研究对象1) 机械工程控制理论主要是研究机械工程技术为对象的控制论问题。2) 当系统已经确定,且输出已知而输入未知时,要求确定系统的输入以使输出并根据输出来分析和研究该控制系统的性能,此类问题称为系统分析。3) 最优控制制:当系统已经确定,且输出已知而输入已施加但未知时,要求识别系统的输入以使输出尽可能满足给定的最佳要求。4)滤波与预测问题当系统已经确定,且输出已知,输入已施加当未知时,要求识别系统的输入(控制)或输入中的有关信息 。5) 当输入与输出已知而系统结构参数未知时,要求确定系统的结构与参数,即建立系统的数学模型,此类问题及系统辨识。6) 当输入与输出已知而系统尚未构建时,要求设计系统使系统在该输入条件下尽可能符合给定的最佳要求,此类问题即最优设计。1.3 控制系统的系统的基本概念1) 信息传递是指信息在系统及过程中以某种关系动态地传递的过程。2) 系统是指完成一定任务的一些部件的组合。3) 控制系统是指系统的可变输出能按照要求的参考输入或控制输入进行调节的系统。4) 系统分类:
2、按照控制系统的微分方程进行分类分为 线性系统 、 非线性系统 。按照微分方程系数是否随时间变化分为 定常系统和时变系统。按照控制系统传递信号的性质分类分为连续、离散系统 。按照系统中是否存在反馈将系统分为开环控制、闭环控制系统 。5) 对控制系统的基本要求有稳定性、快速性、准确性第二章 拉普拉斯变换的数学方法2.3 典型时间函数的拉式变换(必须牢记)1) 单位阶跃函数为,2) 单位脉冲函数为,单位脉冲函数具有以下性质3) 单位斜坡函数为,L(t)?4) 指数函数为,。5) 正弦函数为,6) 余弦函数为,7) 幂函数为8) 几种常用的拉式变换公式2.4 拉氏变换的性质1) 线性性质L2sin3t?5?2) 实数域的位移定理。3) 复数域的位移定理。4) 微分定理,Lf(解微分方程时使用最多)5) 积分定理,L.f(t)(dt)?。6) 初值定理。7) 终值定理。8) 卷积定理。2.5 拉式反变换的数学方法)2.6 用拉式变换求解常微分方程1) 思路:常微分方程-利用微分定理进行拉式变换求F(s)-拉式反变换求解f(t)。2) 如:求微分方程第三章 系统的数学模型 .3.1 概述1) 数学
3、模型概念 在控制系统中为研究系统的动态特性而建立的一种模型 。2) 建立数学模型的方法有 分析法 和 实验法 。3)线性系统最重要的特性是 叠加原理 ,具体内容是 系统在几个外加作用下所产生的响应等于各个外加作用单独作用下的响应之和 。4) 本课程中主要研究 线性定常 系统。5) 对于非线性系统如何处理 线性化 、 忽略非线性因素 、用非线性系统的分析方法来处理 。6) 在时域中用 微分方程 描述系统动态特性,在复数域或频域中用传递函数或频率特性 来描述系统的动态特性。3.2 系统微分方程的建立1)机械系统通常根据 达朗贝尔 原理列写微分方程,该原理具体内容为 作用于每一个支点上的合力,同质点惯性力形成平衡力 ,直线运动应用该原理可列写平衡状态下的微分方程 。转动的运动微分方程为 。2)液压系统应用 流体的质量守恒 定律,内容为 系统的总流入流量与总流出流量之差与系统中流体受压缩产生的流量变化及系统容积变化率产生的流量变化之和相平衡 。3)电网络系统采用 基尔霍夫电流 定律和 基尔霍夫电压 定律,具体内容分别为 若电路由分支就有节点,汇聚到某节点的所有电流的代数和应等于0,即所有流出节
4、点的电流之和等于所有流进节点的电流之和 、 电网络的闭合回路中电势的代数和等于沿回路的电压降的代数和 。3.3 传递函数传递函数的定义 对于单输入单输出线性定常系统,在初始条件为零的条件下,系统输出量的拉氏变换与输入量的拉氏变换之比 。传递函数的特征方程是 传递函数的分母多项式A(s)=0 。1)传递函数主要特点:1、 传递函数只适用于线性定常系统,它只反映在零初始条件下的动态性能,2、系统的传递函数只与系统本身的参数有关,与外界输入无关。3、对于物理可实现系统4、一个传递函数只能表示一对输入、输出之间的关系,5、传递函数不能说明被描述的系统的物理结构2) 传递函数当S=Zi(i=1,2,m)时, 的零点是极点是 。3) 传递函数的典型环节有比例环节 、 积分环节 、 微分环节 、惯性环节 、 一阶微分环节 、 震荡环节 、二阶微分环节 、 延时环节 。3.4 框图1) 框图的定义 系统中各个环节的功能和信号流向的图解表示方法 。2) 框图的组成元素有 方块 、 信号线 、 分支点 、 相加点 。3) 动态系统构成有 串联 、 并联 、 反馈 三种形式。4) 请分别画出三种结构图并写出
《02240机械工程控制基础》由会员jiups****uk12分享,可在线阅读,更多相关《02240机械工程控制基础》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
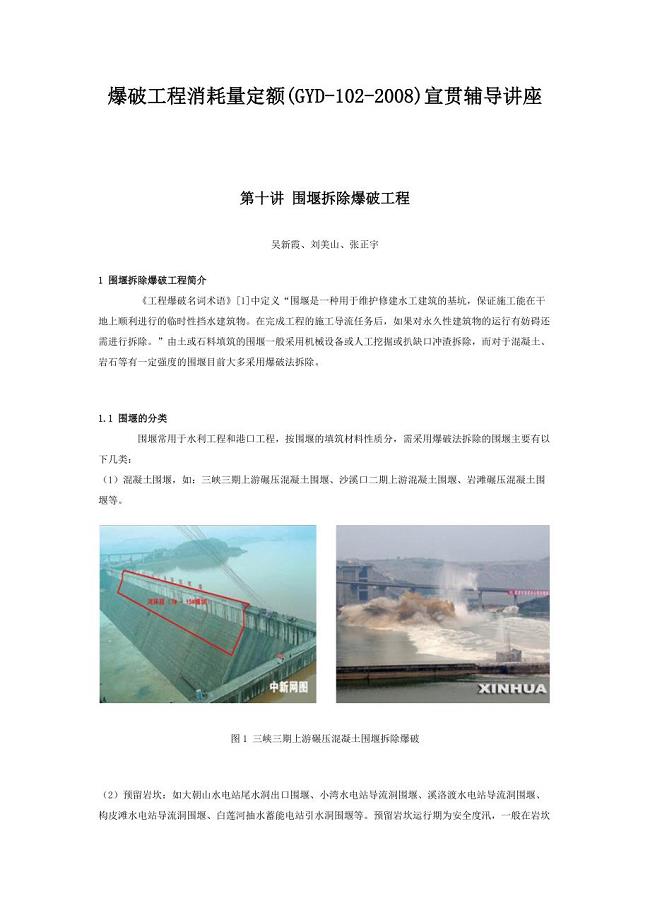
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
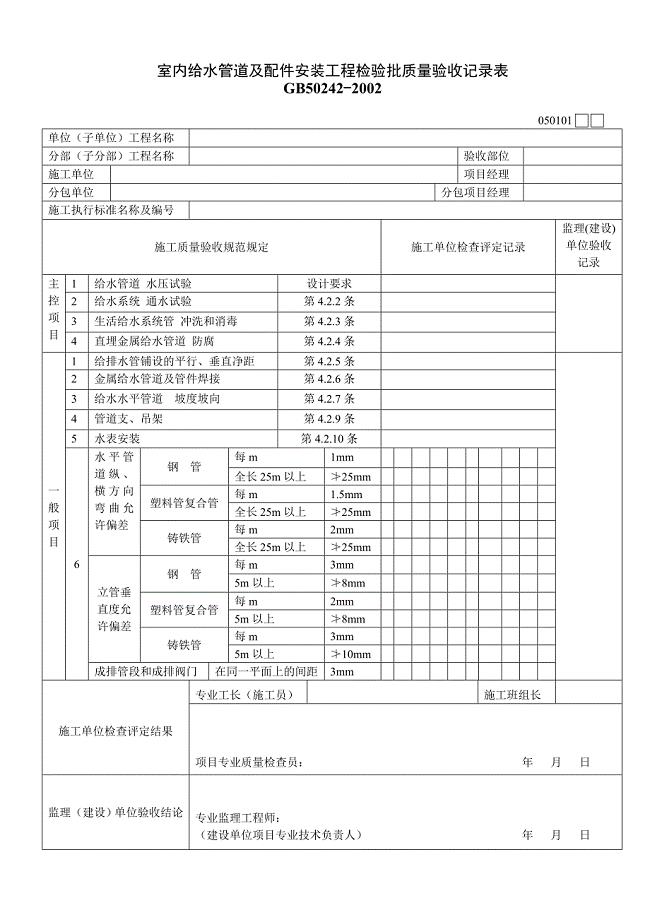
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 小数数学题:简便计算11道练习题及参考答案A10
小数数学题:简便计算11道练习题及参考答案A10
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A7
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A3
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A5
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A9
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A6
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A8
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A1
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A4
2024-04-17 2页
小数数学题:简便计算11道练习题及参考答案A2
2024-04-17 2页