
计算机时代下的自动控制理论与自动化技术(2017大学报告)
131页
1、韩璞 教授,TEL:13703120264 E-mail: http:/,计算机时代下的 自动控制理论与自动化技术,2、电子元器件与数字计算机的发展简史,报告内容,3、自动控制理论发展的三个阶段,4、计算机时代控制理论的数学工具数字仿真与参数优化,5、系统智能建模方法,6、自动控制系统分析与优化设计,1、自动控制学科简述,前 言,我们每个人都生活在4维空间,我们的思想、理念、知识、理论和技术都是时间的变量, 韩璞,一、 自动控制的问题描述,问题描述,设计一个自动控制系统:,控制系统任务:,在一定的品质指标下 消除一切扰动,维持被控量为希望值,时域指标,频域指标,开环控制系统的品质指标,品质要求:按程序步运行,“自动控制理论” 所要解决的问题,1、被控对象的数学模型,2、控制系统的调节品质指标,3、控制系统的结构,4、控制器结构或算法(PID等),5、最优品质指标下的控制器结构或参数,自动控制对象,发电过程,1、过程控制,石化过程,2 运动控制,3 程序控制,数控机床,生产线,轨道交通,大型设备的启停,切削加工自适应控制系统,大型引风机启动逻辑程序步骤,混杂系统,生产(运动)过程系统,自
2、动化设备(系统),自动控制理论主要针对生产(运动)过程系统,4 混杂系统,二、电子元器件与数字计算机的 发展简史,电子管,晶体管,集成电路,微处理器,1947年发明 5070年代使用,1971年 80年代后得到了快速发展,1961年发明 7080年代使用,1904年发明,1、控制器元器件发展,运算放大器:,60年代晚期集成电路,1930年电子管,1950年后晶体管,第一代:电子管计算机,第二代:晶体管计算机,第三代:集成电路计算机,第四代:大规模集成电路计算机,1946年2月14日 世界上第一台计算机诞生,(1964-1971),(1967年1978年),1951:无操作系统,机器指令或汇编语言,(1957-1964),中国第一台1967,2、计算机的发展历程,计算机硬件结构,冯诺依曼,(1.8万只,占地170m2,30t),第五代:智能计算机:,第六代:生物计算机,(一个蛋白质分子就是存储体),能够模拟、延伸、扩展人类的智能,(1980年代),1983年美国提出生物计算机的概念,目前正在研究发展,还没有被商业化,3、微处理器(CPU)与个人计算机(PC),1、1971年,Intel公
3、司首先推出了世界上第一个4位微处理器芯片Intel 4004同年,第一台使用了4004芯片的微型计算机诞生了。,2、1972年Intel公司推出了8位微处理器芯片8008,之后的几年中,8位微型计算机得到了飞速的发展。其中最为著名的是苹果公司的Apple II,3、1978年Intel公司推出了16位微处理器芯片8086,5、1985年Intel公司推出32位微处理器80386,4、1981年第一部桌上型计算机IBMPC (personal computer),计算机硬件结构总线结构,三、自动控制理论发展的三个阶段,J.C.Maxwell 发表了“论调节器”,1868年,1948年维纳发表了控制论,在这一时期,使用的电子元器件是电子管,存在着体积、质量和使用寿命等都诸多问题,当时又没有计算机作为计算工具,所以,不得不根据经验选用合适的、简单的、工程上易于实现的控制器,采用人工做草图和表的方法,对控制系统进行分析与优化设计,进而使得控制算法能在实际工程中得以实现并能满足控制品质要求。,1、经典控制理论阶段(1868-1948年),不能在时域求出微分方程的解析解和数值解,变换到复频域,用做
4、草图的方法求解微分方程,控制器:,P,超前滞后补偿,(超调量和过渡时间),频率域品质指标:,比例控制是有差控制,仅适合无自平衡对象,经典控制理论更适合运动过程系统,例:,经典控制理论主要贡献,1)传递函数,1942年 H.Harris定义了传递函数:在零初始条件下,系统输出的拉氏变换与输入拉氏变换只比。然而,拉氏变换是法国数学家、天文学家拉普拉斯( Laplace)于1812年提出来的,主要用来求解微分、积分方程,偏微分方程。,2)劳斯稳定性判据,劳斯表:,缺陷: 1、求闭环传递函数困难 2、只能得到临界稳定点,劳斯于1877年提出的稳定性判据能够判定一个多项式方程中是否存在位于复平面右半部的正根,而不必求解方程,3)根轨迹法判据,缺陷: 1、求闭环传递函数困难 2、绘制根轨迹困难 3、只能是一个参数的根轨迹 4、很难给出闭环极点要求,1948年,W.R.Evans提出了一种求特征根的简单方法,这一方法不直接求解特征方程,用作图的方法表示特征方程的根与系统某一参数的全部数值关系,4)奈奎斯特稳定性判据,缺陷: 1、给出频域品质指标困难 2、频率特性曲线难于绘制,美国学者H.奈奎斯特19
《计算机时代下的自动控制理论与自动化技术(2017大学报告)》由会员206****923分享,可在线阅读,更多相关《计算机时代下的自动控制理论与自动化技术(2017大学报告)》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
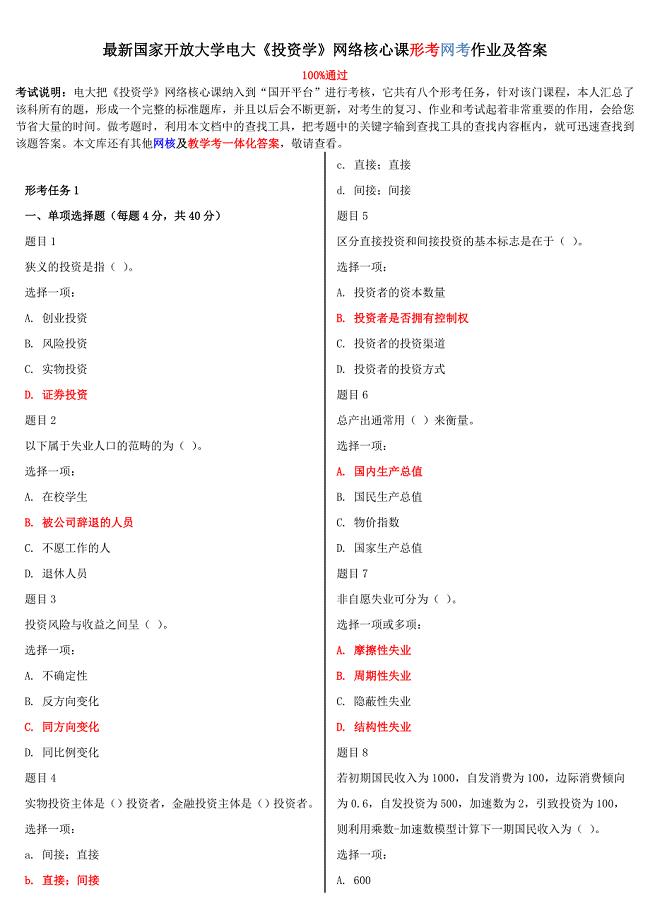
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
初中人教版七年级上册下册全册生物复习提纲21页 (1)
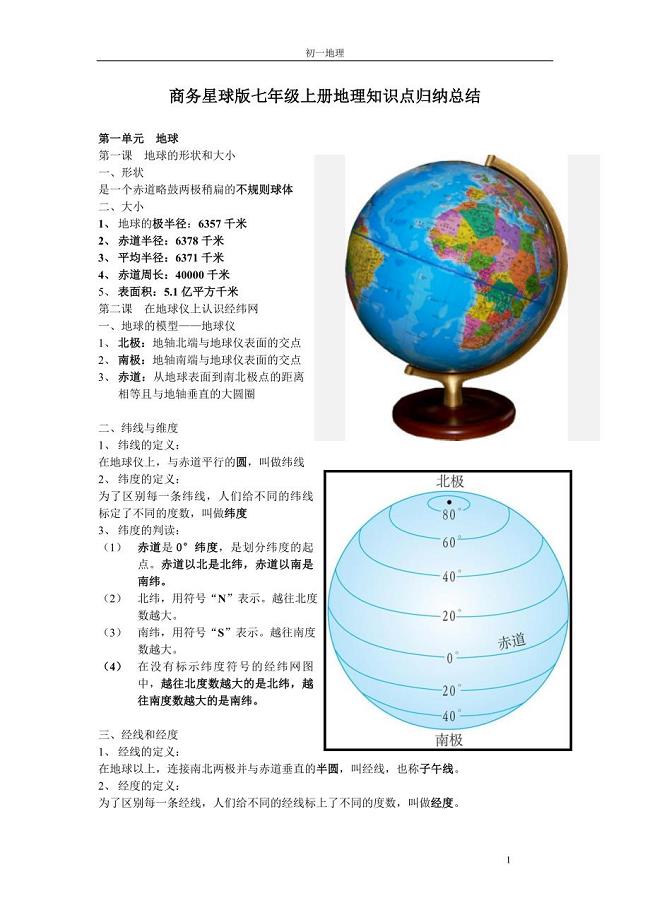
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 开学第一课安全教育-主题班会教育教学课件
开学第一课安全教育-主题班会教育教学课件
2024-04-09 29页
高中英语元宵节猜灯谜活动英文课件
2024-04-08 25页
部编版高一语文上册(必修一)《“探界者”钟扬》课件
2024-04-08 13页
部编版高一语文上册(必修一)《读书:目的和前提》课件
2024-04-08 17页
部编版高一语文上册(必修一)《喜看稻菽千重浪——记首届国家最高科技奖获得者袁隆平》课件
2024-04-08 17页
部编版高一语文上册(必修一)《立在地球边上放号》课件
2024-04-08 11页
部编版高一语文上册(必修一)《峨日朵雪峰之侧》课件
2024-04-08 14页
部编版高一语文上册(必修一)《沁园春长沙》课件
2024-04-08 17页
部编版高一语文上册(必修一)《拿来主义》课件
2024-04-08 15页
部编版高一语文上册(必修一)《红烛》课件
2024-04-08 16页