
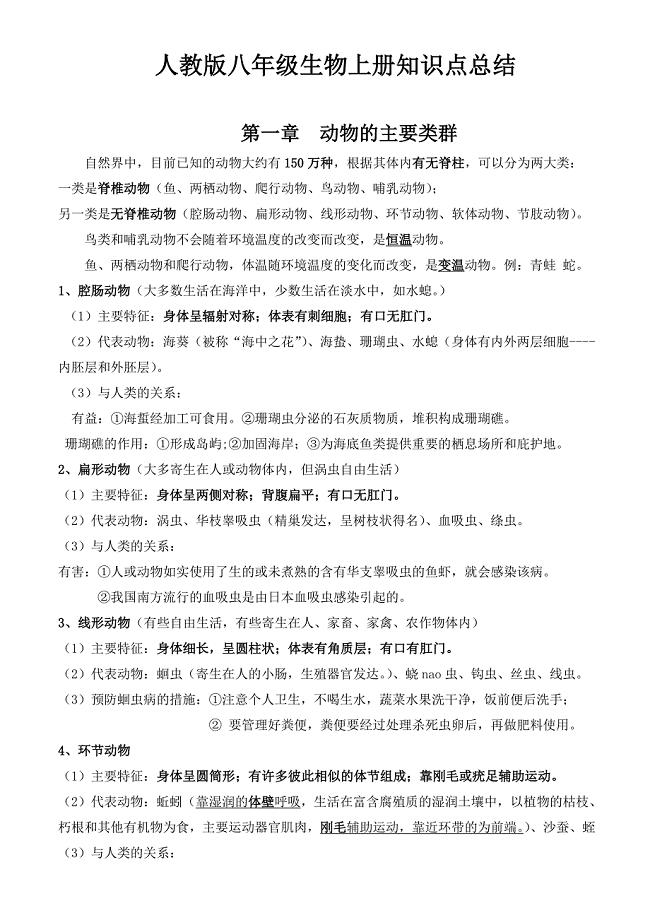
一阶直线倒立摆系统
14页
1、 一阶直线倒立摆系统一阶直线倒立摆系统 周耀龙 144173248 摘摘 要要 倒立摆问题是动力学中最重要的问题之一,并且在控制理论中已被充分的研究过。它是一个已经被建立的 基准问题,这给控制设计提供了很多具有挑战性的问题。该系统是非线性,不稳定,非最小相位和欠驱动的。伴随 噪音测量信号,它不是去状态可测量的。存在许多寄生效应例如,摩擦,杆和轴的弹性模式,齿轮和皮带的反弹效 应,连同输入饱和。这些挑战使得倒立摆成为控制实验室中一个典型的工具。 关键词关键词 倒立摆;仿真 一、一、 前言前言 ( (一一) ) 问题提出问题提出 倒立摆不仅仅是一种优秀的教学试验仪器,同时也是进行控制理论研究的理想平台。由于倒立 摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人 员一直将它是为典型的研究对象,不断从中发掘新的控制策略和控制算法,相关的科研成果在航天 科技和机器人学方面获得了广阔的应用 倒立摆有许多控制方法,比较常见的有频率响应控制、PID 控制、极点配置控制、根轨迹控制、 LQR 控制等。倒立摆系统是一个非线性、不稳定的快速系统,其控制方式与直立行走的机
2、器人、飞 行中的静不稳定导弹有许多相似之处。倒立摆系统是控制理论试验的典型装置,也是控制理论研究 中常用的验证对象。在多种控制理论和方法的研究应用中,特别是在工程实践,存在一种可行性的 实现问题,使其理论和方法得到有效的检验,倒立摆就能为此提供一个从控制理论通往实践的桥梁。 ( (二二) ) 研究现状研究现状 倒立摆的最初研究开始于 20 世纪 50 年代, 由(MIT)美国麻省理工学院的控制论专家根据火箭发 射助推器原理设计;而后人们又参照双足机器人控制问题研制出二级倒立摆控制设备,从而提高了检 验控制理论和方法的能力,也拓宽了检验范围随着研究的深入和实际问题的推动又发展出了三级摆 和四级摆。他们的研究成果具有重要的工程背景,在机器人的站立与行走、通讯卫星和侦察卫星姿 态的稳定、多级火箭飞行姿态的控制等领域发挥了巨大的作用。 我国则从 70 年代中期开始研究倒立摆,首先根据经典控制理论与现代控制理论应用极点配置 法,设计模拟控制器,国内外专家学者先后控制了单级倒立摆与二级倒立摆的稳定。随着微机的广 泛应用,又陆续实现了数控二级摆的稳定。随着摆杆级数的增加,多级倒立摆由于其高度非线形和
3、 不确定性,其控制成为世界公认的难题。 2002 年 8 月北京师范大学数学系李洪兴教授领导的科研团队采用 “变论域自适应模糊控制理论” 成功地实现了全球首例“四级倒立摆实物系统控制” 。而由此项理论产生的方法和技术将在半导体及 精密仪器加工、机器人技术、导弹拦截控制系统、航空器对接控制技术等方面具有广阔的开发利用 前景。 硬件在回路仿真技术中自 20 世纪 60 年代问世直到目前美国研制航天飞机,始终盛行不衰。美 国人非常重视这方面的研究和应用,把模拟和仿真技术看作是降低导弹防御和战术导弹武器系统生 命周期费用的切实可行的手段,并且在制导武器系统的开发方面应用模拟和仿真技术已经有很长的 历史。 20 世纪 80 年代我国建设了一批高水平、大规模的硬件在回路仿真系统,如射频制导导弹仿真 系统、红外制导导弹仿真系统、歼击机工程飞行模拟器、歼击机仿真系统、驱逐舰半仿真系统等, 这些硬件在回路仿真系统在武器型号研制中发挥了重大作用。 ( (三三) ) 研究内容研究内容 在认真复习已学相关课程和查阅相关文献的基础上,掌握一阶倒立摆系统模型的建立方法、最 优控制器设计,基于 Matlab 实现系
4、统各状态变量和控制律的仿真。 运用牛顿动力学方法建立其非线性数学模型,得到系统的状态空间方程;用极点配置法、线性 二次最优控制策略的 LQR 法和模糊控制法,设计倒立摆控制系统的控制器;通过 MATLAB 对一阶 直线倒立摆系统进行仿真和实物控制。 二、二、 倒立摆系统倒立摆系统 ( (一一) ) 简介简介 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多个技术的有机结合,其被控系统 本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象 对其进行研究。 最初研究开始于 20 世纪 50 年代, 麻省理工学院(MIT)的控制理论专家根据火箭发射器助推器原 理设计出一级倒立摆实验设备。今年来新的控制方法不断出现,人们试图通过倒立摆这一典型的控 制对象,检验新的控制算法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中 找出最优秀的控制方法。 倒立摆系统作为控制理论中比较理想的试验手段,为自动控制理论的教学、试验和科研构建一 个良好的试验平台,以用来检验某种控制理论或方法的典型方案,促进到了控制系统新理论、新思 想的发展。 由于控制理论的广
《一阶直线倒立摆系统》由会员206****923分享,可在线阅读,更多相关《一阶直线倒立摆系统》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
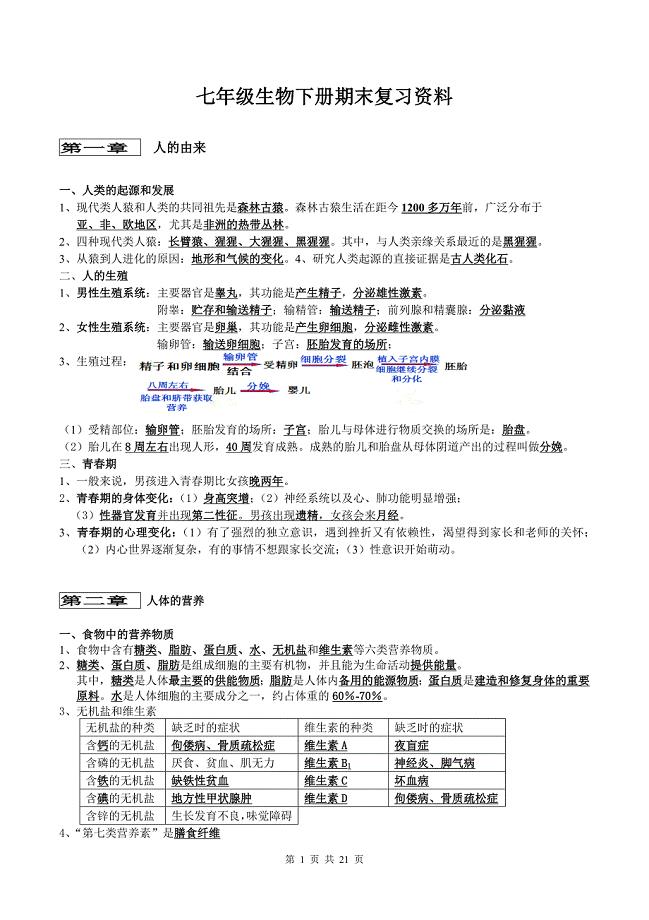
初中人教版七年级上册下册全册生物复习提纲21页 (1)
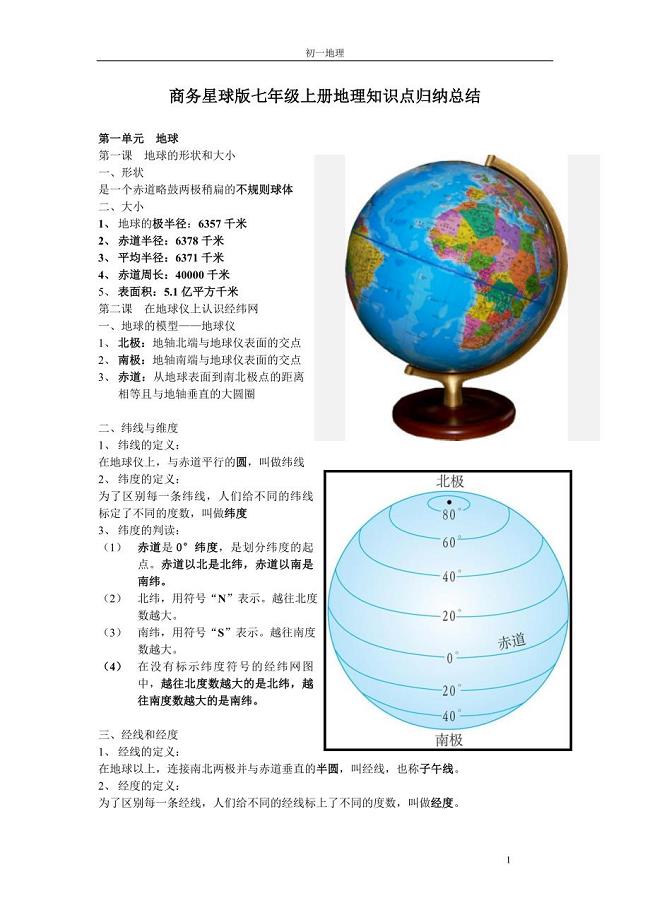
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页