
3D打印机系统设计
43页
1、Harbin Institute of Technology课程设计说明书 课程名称:自动控制元件及线路 设计题目:3D打印机的研究与设计方案 院系: 航天学院自动化 班级: 1104104 设计者: 学号: 指导教师: 设计时间:10.15-12.22 哈尔滨工业大学 摘 要本次课程设计通过对2D打印机的了解和对电机传感器的认识,通过类比和分析来初步设计3D打印机。本文主要内容为电机类型,型号选择及参数的测算,并且应用了PWM控制等数字信号在电机控制中进行驱动。比较了不同种类传感器的优劣,选出了对比优化方案及元件。利用控制理论实现了3维定位和实现打印功能,给出初步设计方案。关键词:步进电机、传感器、3D、定位控制系统、数字信号处理器一、国内外在该方面的研究现状分析及研究的目的意义 1、现状及研究意义:3D打印快速成型技术实质是“快速成型技术”,也被称为“增量技术”、“增材技术”,是传统制造技术与新材料的完美结合,并且将带动工业设计、新材料、精益制造等多个领域颠覆性的改变。3D打印技术作为目前最具有生命力的快速成型技术之一,适用于家用电器、办公室用品、建筑模型、医学模型等领域的新产品开
2、发,已经广泛应用到航空航天等军事领域和大型复杂构件的一次成型制造,在国外,3D打印机已经商品化。作为一种经济型快速成型技术,综合应用了CAD/CAM技术、激光技术,光化学以及材料科学等绪多方面的技术和知识,让产品设计、建筑设计、工业设计、医疗用品设计等领域的设计者,第一时间方便轻松的获得全彩色实物模型,便于重新修定CAD设计模型,从而节省了为错误设计制造工艺装备的费用,并节省了研制时间。它具有成本低、系统可靠性高,设备体积小、噪声小、成型速度快、产品材料与颜色可多样化等优点,与传统技术相比,三维打印技术还拥有如下优势:通过摒弃生产线而降低了成本;大幅减少了材料浪费。具有巨大的应用潜能和广阔的市场前景。 当下,我国的3D打印技术还处于起步阶段, 3D打印技术基本由大学和一些小企业在做研究,尚未有成品出现,在软件和材料方面相对落后,但是,就在2012年10月17日,中国3D打印技术产业联盟已经成立,这就意味着中国开始越来越重视该技术。因此,开展三维打印快速成型机控制系统的研发,具有重要的现实意义。本课题通过对该机械系统的研究,探索并深入了解电机,传感器及反馈系统,达到加深对课内知识的理解的
3、目的,并利用控制理论实现了3维定位和实现打印功能,给出初步设计方案。 2、基本原理:每一层的打印过程分为两步,首先在需要成型的区域喷洒一层特殊胶水,胶水液滴本身很小,且不易扩散。然后是喷洒一层均匀的粉末,粉末遇到胶水会迅速固化黏结,而没有胶水的区域仍保持松散状态。这样在一层胶水一层粉末的交替下,实体模型将会被“打印”成型,打印完毕后只要扫除松散的粉末即可得到模型,而剩余粉末还可循环利用。2、 任务分析1、 确定实现系统功能:设计一个3D打印机,可以实现用热能加热熔融材料,并从喷头喷出,逐层堆积出模型。 由3D打印机的基本原理我们分析其功能需求大致有:分层软件、叠加粘贴、输入图形、定位监测等。3D打印与2D打印相同之处在于,其都是采用逐渐扫描,扫描完毕再输出的设备。2、性能指标:(1).温度范围: 储存温度:0-32 工作温度:15-32(2).工作空间速度尺寸(cm)最大工作长(宽)度30最大工作高度38(3) 打印速度精度: 定位精度:x、y轴0.011mm,z轴0.0025mm 打印速度:4s/层 每层厚度:0.18mm 喷嘴直径:0.4mm 运动轴速度:40mm/s三、技术实现方
4、案1.结构设计:主要分为三大部分,一为电机控制位移系统,二为传感反馈系统,三为电源系统。电机控制分为驱动喷头和控制位移两大部分。传感反馈分为位置传感器、温湿度传感和压力传感器。机械结构X轴机构选用导轨-同步齿形带机构;Y轴机构选用光杠-同步齿形带机构;Z轴机构选用两副光杠-丝杠机构;铺粉辊机构选用导轨-同步齿形带机构。控制系统图2 位移快速定位系统在经济型数控机床中,普遍采用步进电机作为伺服驱动部件。步进电机将电脉冲信号转换成角位移,驱动执行机构按一定的规律运动。高精度的位置控制常采用全闭环控制。然而全闭环位置控制不仅需要高精度的位置检测装置,而且控制系统结构包含非线性环节导致控制系统模型复杂化,影响系统的稳定性和快速性。1.选择电机:电动机型式、电压与转速的选择(1)根据电机启动频率,有无调速要求选择是使用直流电动机或交流电动机;(2)选择电动机额定电压的大小;(3)根据转速要求及传动设备的质量选取它的额定转速与转矩;(4)由生产机械所需要的功率大小来决定电动机的额定功率(容量)。综合以上方面考虑,最后选择与要求相符的电动机。b.几种电机的参数性能比较:步进电机直流电机伺服电机力矩和
《3D打印机系统设计》由会员206****923分享,可在线阅读,更多相关《3D打印机系统设计》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
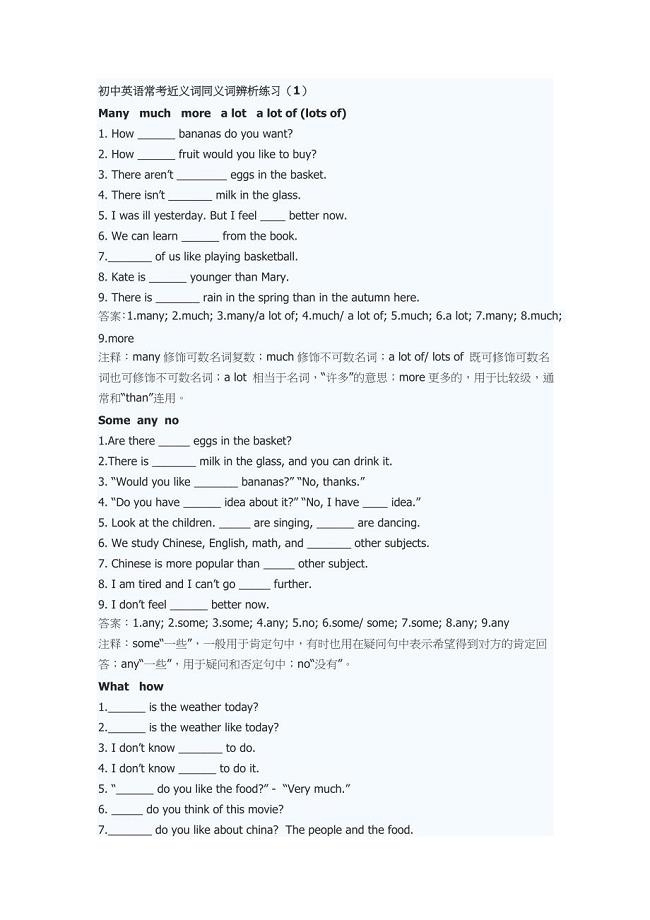
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
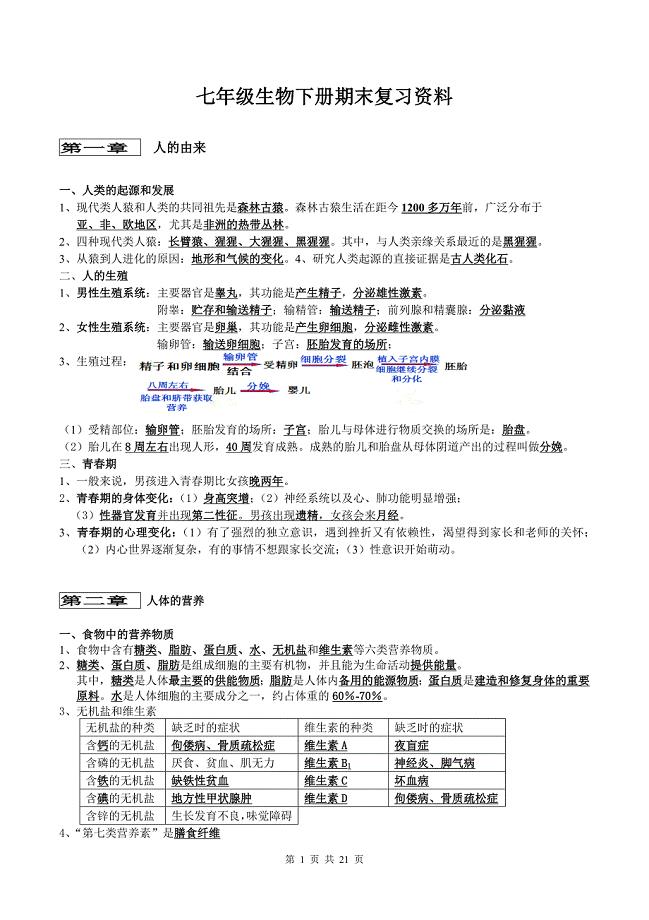
初中人教版七年级上册下册全册生物复习提纲21页 (1)
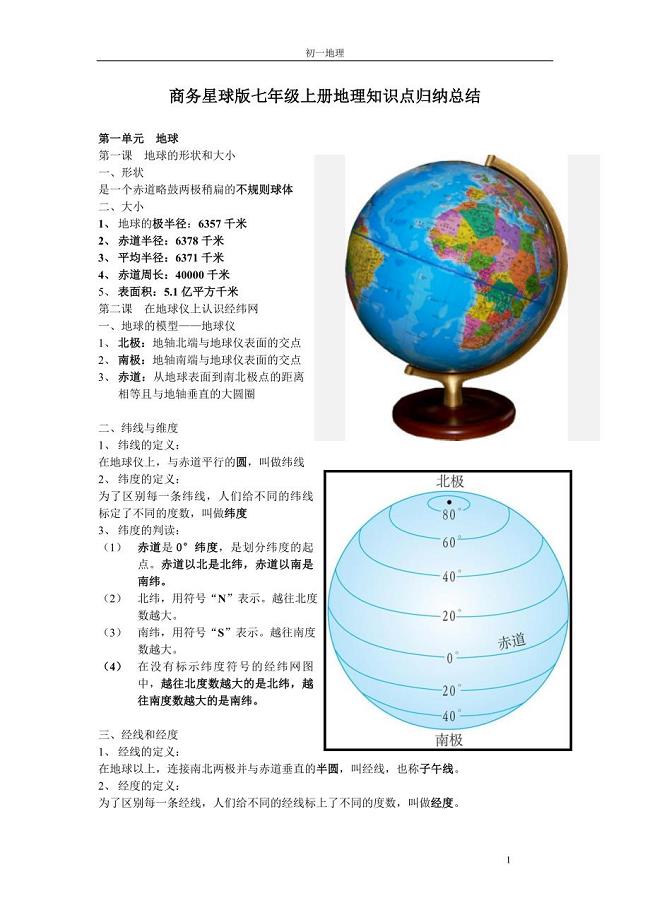
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页