
现代控制一级倒立摆
16页
1、倒立摆实验电子工程学院自动化 学号:目录1实验设备简介21.1倒立摆介绍21.2直线一级倒立摆32 倒立摆建模32.1 直线一阶倒立摆数学模型的推导32.1.1受力分析42.1.2微分方程建模52.1.3状态空间数学模型62.2 实际系统模型建立73系统定性、定量分析83.1系统稳定性与可控性分析83.1.1稳定性分析83.1.2能控性分析94极点配置的设计步骤94.1极点配置的计算94.2用MATLAB进行极点配置的计算114.3极点配置的综合分析125小结131实验设备简介1.1倒立摆介绍倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆。如杂技演员顶杆的物理机制可简化为一级倒立摆系统,是一个复杂,多变量,存在严重非线性,非自制不稳定系统。常见的倒立摆一般由小车和摆杆两部分组成,其中摆杆可能是一级,二级或多级,在复杂的倒立摆系统中,摆杆的长度和质量均可变化。1.2直线一级倒立摆根据自控原理实验书上相关资料,直线一级倒立摆在建模时,一般忽略系统中的一些次要因素.例如空气阻力、伺服电机的静摩擦力、系统连接处的松弛程度等,之后可将直线一级倒立摆系统抽象成小车和匀质的杆组成的系统
2、。倒立摆系统是典型的机电一体化系统其机械部分遵循牛顿的力学定律其电气部分遵守电磁学的基本定理.无论哪种类型的倒立摆系统,都具有3个特性,即:不确定性、耦合性、开环不稳定性. 直线型倒立摆系统,是由沿直线导轨运动的小车以及一端固定于小车上的匀质长杆组成的系统.小车可以通过传动装置由交流伺服电机驱动. 小车导轨一般有固定的行程,因而小车的运动范围是受到限制的。2 倒立摆建模2.1 直线一阶倒立摆数学模型的推导对于忽略各种摩擦参数和空气阻力之后,直线一即倒立摆抽象为小车和均质杆组成的系统。本系统的参数定义如下:M小车质量m摆杆质量b小车摩擦系数 l 摆杆转动轴心到杆质心的长度I 摆杆惯量F 加在小车上的力 x 小车位置(变量) 摆杆与垂直向上方向的夹角(输出) 摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)2.1.1受力分析下面我们对这个系统作一下受力分析。和为小车与摆杆相互作用力的水平和垂直方向的分量。应用牛顿第二定律方法来建立系统的动力学方程过程如下:分析小车水平方向所受的合力,可以得到以下方程: (2-1)由摆杆水平方向的受力进行分析可以得到下面等式: (2-2) (2-3)
《现代控制一级倒立摆》由会员小**分享,可在线阅读,更多相关《现代控制一级倒立摆》请在金锄头文库上搜索。
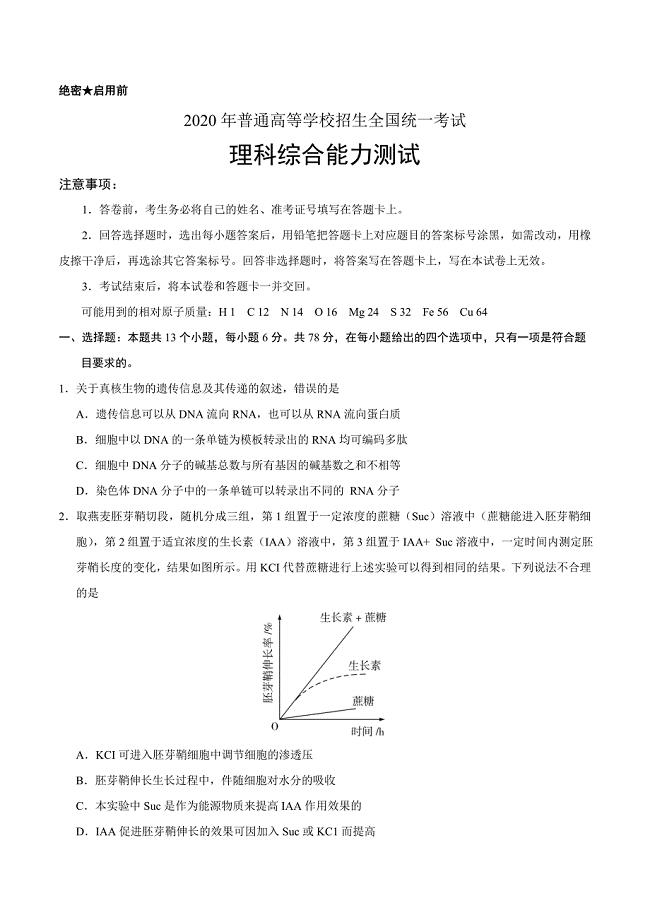
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页