
微位移技术
17页
1、微位移技术第一章概论第二章微位移机构第三章柔性铰链第一章概论作为精密机械与精密仪器的关键技术之一一微位移技术,近年来随着微电子技术、宇航、生物工程等学科的发展而迅速的发展起来。例如用金刚石车刀直接车削大型天文望远镜的抛物面反射镜时,要求加工出几何精度高于l/l0光波波长的表面,即几何形状误差小于0.5u m。计算机外围设备中大容量磁鼓和磁盘的制造,为保证磁头与磁盘在工作过程中维持1um内的浮动气隙,就必须严格控制磁盘或磁鼓在高速回转下的跳动。特别是到20世纪70年代后期,微电子技术向大规模集成电路和超大规模集成电路方向发展,随着集成度的提高,线条越来越微细化。256K动态RAM线宽已缩小到1.25um左右,目前己小于0.1um,对与之相应的工艺设备(如图形发生器、分步重复照相机、光刻机、电子束和X射线曝光机及其检测设备等)提出了更高的要求,要求这些设备的定位精度为线宽的1/31/5,即亚微米甚至纳米级的精度。 生物工程是当今一门崭新的学科,现代科学的发展要求,随意捕捉和释放单一游离细胞,或向细胞内注入和拾取某一成份,同时还能测定和记录细胞生物的电参数,因此研制满足这一要求的设备同样离不
2、开微位移技术。随着机器人技术的发展,机器人精微操作已成为机器人研究领域中的重要课题之一,如用机器人完成精密伺服阀,压电陀螺等精密零部件的装配作业,其技术关键之一是微位移技术的研究.1因此,微位移技术是现代工业基础的重要组成部分,它几乎左右着上述各领域的发展,并引起国内外研究人员的极大关注,他们加紧了这方面的研究,并取得了很大进展。由于定位技术的水平几乎影响着整个设备的性能,因此直接影响到微电子、宇航、生物工程等高科技技术的发展。例如精密仪器,无论是大行程的精密定位,还是小范围内的光学对准,都离不开微位移技术。因此微位移技术,成为现代精密仪器工业的共同基础。 1.1国内外现状及发展趋势 美国LLN以美国知名核聚变实验室)研制的加工大口径光学元件的金刚石车床(LODTM)是目前世界上能进行最高精度切削加工的车床,其所用的快速刀具伺服机构采用了PZT(错钦酸铅压电陶瓷),能在士1.27um范围内分辨力达到2.5nm,频率响应可达到IOOHz;日本日立制作所采用柔性支承导轨、压电晶体驱动方式的微位移机构的位移精度为士0.05um,行程为士8um,该机构已成功应用于电子束曝光机;中国国防科技大学
3、采用柔性支承导轨、电致伸缩驱动方式的微位移机构的分辨力为0.01um,行程为20um4。现将收集的具体资料列于下表1-1 1.2系统研制的意义 微位移技术是超精密加工及检测中的一项关键技术。特别是纳米技术的飞速发展,使微位移的精度要求由微米级而上升到纳米级。随着扫描隧道显微镜(STM)及原子力显微镜(AFM)的广泛应用,更加需要有高精度,高分辨率,能够灵活控制的微动系统,以实现纳米级的加工及检测精度。 微位移技术也推动了微电子技术、宇航、生物工程等学科的迅速发展。例如精密仪器,无论是大行程的精密定位,还是小范围内的光学对准,都离不开微位移技术。因此微位移技术,己经成为现代精密仪器工业的共同基础,是衡量一个国家科技水平的重要标志,代表了一个国家加工技术水平的高低。发展微位移技术,是非常重要的。 1.3微位移系统工作原理2 压电陶瓷PZT存在着迟滞、蠕变和非线性等缺点,在要求实现高分辨率微量位移的场合,必须建立闭环控制系统把与输出位移对应的电压值反馈回来,控制加在压电陶瓷上的电压,不断地修正各种干扰造成的机构位移偏差,以实现给定的位移.控制原理框图如图1所示。机构的位移量由传感器测量,测量
4、信号一路送给计算机,另一路与计算机发出的指令信号进行比较,经比较放大后再把信号加到PZT上,实现精密定位和微量位移.第二章微位移机构微位移技术包括:微位移机构、检测装置和控制系统3大部分。微位移机构是指行程小(小于毫米级),精度高(亚微米、纳米级)及灵敏度高的机构,它是微位移技术中的关键部件之一,也是一种机、电、磁一体化的组合件。它既可作为微进给和微调节部件,也可作为工艺系统动、静误差补偿的关键部件。现在,微位移机构已能达到0.005-0.01um的分辨率。微位移机构由微位移驱动器和微动工作台组成。根据微位移驱动器和微动工作台导轨形式可分为5类:a)柔性支承,压电晶体或电致伸缩微位移器驱动。b)滚动导轨,压电晶体或电致伸缩微位移器驱动。c)平行弹性导轨,电磁、压电或机械式驱动。d)滑动导轨,机械式或压电式驱动。e)气浮导轨,伺服电机和直线电机驱动。 本文将介绍一些典型的微位移机构的结构原理、特点及应用,并对它们作一些比较分析。 1直线电机式微位移机构 直线电机具有任意的调节行程,无限的位移分辨率的优点。在利用空气轴承微步进直线电机作为驱动件产生微位移时,由于简化了系统的结构,从而避免了
《微位移技术》由会员小**分享,可在线阅读,更多相关《微位移技术》请在金锄头文库上搜索。
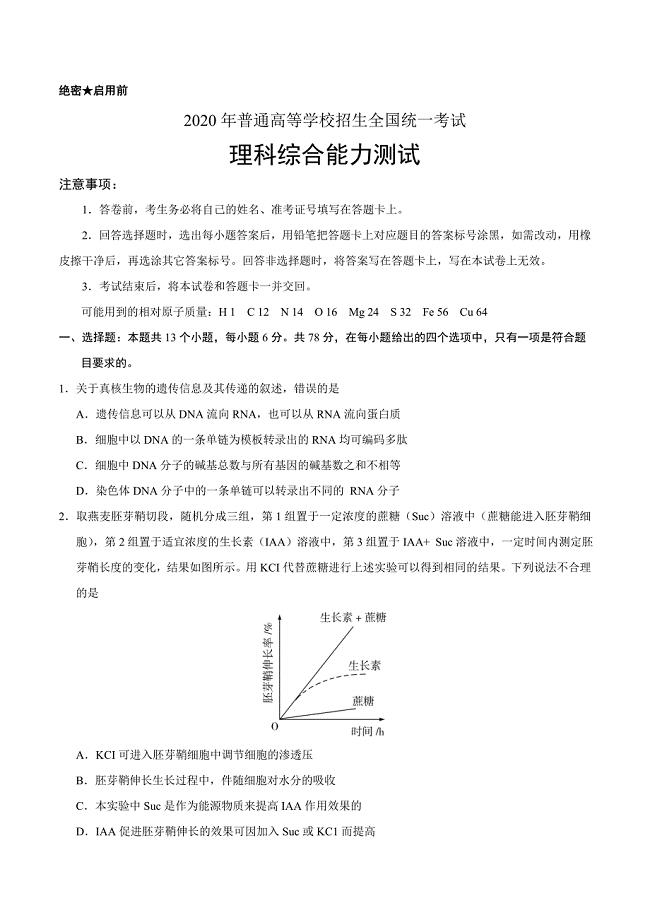
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 09.石油公司制度体系诊断及优化咨询项目
09.石油公司制度体系诊断及优化咨询项目
2024-04-08 33页
职工教育培训经费管理办法(规模生产制造业版)
2024-04-08 10页
08.圆通银行战略咨询项目
2024-04-08 25页
企业培训费管理实施暂行细则
2024-04-08 12页
职工教育培训经费管理办法(适合中小企业)
2024-04-08 10页
企业规章制度框架体系管理规定(2024修订版)
2024-04-08 21页
05.景宏集团全面管理提升咨询项目
2024-04-08 40页
07.玉兔食品集团供应链咨询项目
2024-04-08 34页
04.大华乳业业务战略咨询项目
2024-04-08 28页
06.德邦公司精益生产管理咨询项目
2024-04-08 28页