
莫托曼机器人培训报告(北京李伟)
18页
1、通用打孔机器人学习报告通用打孔机器人学习报告 课长 系长 作成 李伟 学习报告目录学习报告目录 1.培训计划与实际. 2.安全知识要点培训. 3.机器人坐标轴与坐标系. 4.机器人示教. 5.机器人报警解答. 6.机器人维护与保养. 7.学习小结. 1、机器人培训计划与实际 学习目的 掌握机器人完善作业方法 项 目 内容 计/实 11月17号 11月18号 11月19号 11月20号 11月21号 11月22号 去 程 移动 武汉北京 计划 实际 培 训 理论:安装篇、入门篇 实践:简单示教 计划 实际 培 训 理论:操作篇 实践:完整程序示教 计划 实际 培 训 理论:再现模式、命令 实践:再现和命令运用 计划 实际 培 训 理论:系统诊断篇 实践:作业原点设置 计划 实际 培 训 理论:硬件篇、维护篇 实践:理论与实践考核 计划 实际 返 程 移动 北京武汉 计划 实际 培训课程均按计划完成,在北京首钢机器人公司学习5天,22日返回. 国航CA8216 12:30-14:25 国航CA8209 21:35-23:40 学习地点 北京首钢机器人有限公司 学习时间 13年11月17号1
2、3年11月22号 操作人员安全注意事项操作人员安全注意事项 2 、安全知识要点培训 1禁止对防爆结构装置、防爆工程场所进行改造。 2禁止对安全栏、安全栏门、及确认安全栏门关闭的开关类装置进行改造。 3禁止对急停按钮、急停装置进行改造。 4禁止对机器人控制柜等机器人控制装置、本体驱动部分、动力传送部分进行改造。 当实施示教、修改或保养检查、调试等作业时,不得已必须带电作业时,请采取以下措施。 配置监视用急停开关。务必始终用操作盒(带急停开关)作业。 操作开始时,请确认有无异常动作、确认急停开关动作等。 自动运行时,请实施下列措施。 运行中,人员不要进入安全栏内。 运行开始前,请确认以下事项 人员不得进入动作范围内 动作范围内确保没有成为障碍物的工件或工具。 机器人姿势要接近待机位置。 (c)异常发生时,请立即按急停按钮,终止机器人工作。 (d)需要进入机器人动作范围内进行处置时,请务必先终止机器人 运转,切断控制柜电源。 抱闸的解除 机器人的各轴设有特殊的抱闸功能,即:报闸时,保持异常情况发生时的姿势。所以,即使 关闭动力,也无法用手动使本体动作。但是,复原操作时,需要手动改变本体姿势,
3、可通过 控制柜的操作解除抱闸。(选项) 如果在动力关闭的状态下,解除抱闸,由于重力作用于机器人本体的臂上,导致各轴突然向 下方动作,因而非常危险。在实施此项作业时,除操作控制柜的人员外,至少有2个以上的人 员,边支撑着本体,边在需要的最小范围内,改变姿态。 如无必要,请避免强制解除抱闸。 一一.机器人操作前注意事项机器人操作前注意事项. 1.严格遵守此类标识 2.请穿工作服. 3.操作MOTOMAN机器人时,请不要戴手套. 4.内衣 衬衫 领带不要露在工作服外. 5.不要佩戴耳环,挂饰等物品. 6.必须穿好安全鞋,安全帽等安全用品. 二二.机器人操作中注意事项机器人操作中注意事项. 三三.禁止事项禁止事项. 不要扳动机器人的某个轴 不要依靠在控制柜上 2 、安全知识要点培训 一. 对作业现场设备再次确认 安全警示牌 急停按键有效 示教器摆放 电源线的防护 指示灯正常作业 设备防护 结合所学内容重新对设备进行检查,确认机器人各项机能正常作业. 2 、安全知识要点培训 二.人员穿戴确认 安全帽 示教时 不能带 手套 无挂饰 衣着正 确穿戴 3.机器人坐标轴与坐标系 一.学习坐标轴与坐标系前
《莫托曼机器人培训报告(北京李伟)》由会员第***分享,可在线阅读,更多相关《莫托曼机器人培训报告(北京李伟)》请在金锄头文库上搜索。
校园足球汇报
异甘草酸镁注射液【治疗急性药物性肝损伤】Ⅱ期临床研究总结
云教室课程行政伦理学行政良心

语文S版小学二年级语文下册诺亚方舟课件优质课教学课件
未来中考趋势作文考与练
近年来广东历史试题中考易错点分析与教学启示

搜索推广那些事

小学语文二年级上册红领巾真好说课稿设计(说课设计)

新课标人教版二年级语文上册红领巾真好课件

新课程背景下的高中化学课堂教学改革

危机管理与突发事件应对

背影朱自清教案课件二课时
突发公共卫生事件培训
统计学简史及数据科学中南财经大学

水泥混凝土路面技术现状及发展终
有家真好作文讲评课
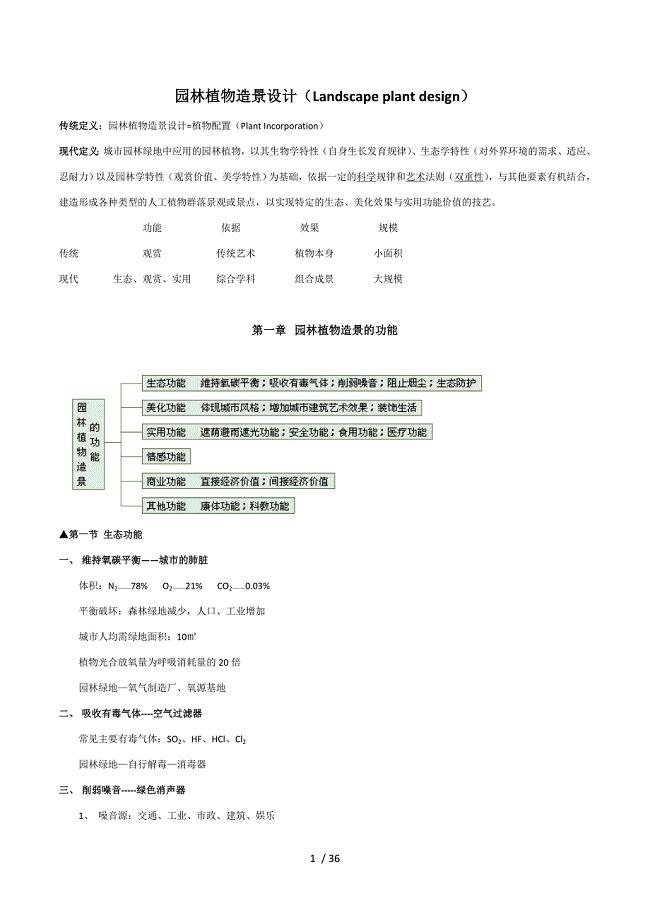
西南大学植物造景设计总复习
海外汉语教学新探索在线交流学习平台Goclef

动态黑色背景年终总结模板
孙子的治军之道与现代管理谋略总结
 最美社区科普员工作事迹材料范文三篇
最美社区科普员工作事迹材料范文三篇
2024-04-19 8页
2024年学校暑期活动总结(3篇)
2024-04-19 11页
数学教研活动主持词开场白(3篇)
2024-04-19 5页
混凝土销售部经理年终总结范文(3篇)
2024-04-19 8页
小学开学班主任发言稿简短(8篇)
2024-04-19 21页
贷款电销个人工作述职报告范文5篇
2024-04-19 16页
乡村医生年度工作总结8篇
2024-04-19 16页
骨干教师自我培训总结(6篇)
2024-04-19 21页
《蓝色多瑙河》教学设计及评价
2024-04-19 7页
酒店客房服务工作心得(3篇)
2024-04-19 8页