
并联机器人englishspeakingparallelrobot
18页
1、Parallel Robot,Chinese Name: 张志文 English Name: Dragon Student ID: 201522080461,2018/12/7,Content arrangement:,1、Introduction to parallel mechanisms and Parallel Robot,2、Parallel Mechanism Analysis,3、Comprehensive Application About Parallel Robot,2018/12/7,2,1 Parallel Mechanism and Parallel Robot,Development and application of robotics technology has greatly changed peoples production and life, not only to help people complete the monotonous, repetitive work, and can perform complex operations i
2、n hazardous environments. However, with the continuous improvement of work requirements, the traditional serial robot there is often a large amount of movement of inertia, low stiffness, accumulation of errors and other shortcomings. Parallel robot is just to make up for these deficiencies.,2018/12/7,3,Parallel robots:Fixed base*1、End effector*1、Independent kinematic chains*n(n=2)。 Robot=Mechanism+Drive Control System+Other accessories Compared with the traditional serial mechanism, the number o
3、f parts is small parallel mechanism (mainly ball screws, telescopic rod, slider member, Hooke joints, ball joints, hydraulic servo motor, etc.), inventory of spare parts and therefore its manufacturing cost is relatively to low, modular and easy to assemble.,1.1 Parallel institutions,Parallel Mechanism,Parallel Robots,2018/12/7,4,Advantage: (1)Stiffness mass ratio. (2)Superior Dynamic Performance. (3)High precision motion. (4)Compact flexibility. (5)Long lasting. Shortcoming: (1)Small workspace.
4、 (2)Development is difficult,1.2 Parallel Mechanism Features,2018/12/7,5,In 1931,Gwinnett entertainment device based on spherical parallel mechanism. In 1938,Pollard invented parallel mechanism for car painting. In 1948,Gough invented parallel mechanism for tire testing. In 1965, Stewart in his article proposes a 6-DOF parallel mechanism, known as the Stewart institution. (Later to be applied to multi-field machine, offshore platform mine, flight simulation, etc.),1931 Gwinnett entertainment sys
《并联机器人englishspeakingparallelrobot》由会员第***分享,可在线阅读,更多相关《并联机器人englishspeakingparallelrobot》请在金锄头文库上搜索。
校园足球汇报
异甘草酸镁注射液【治疗急性药物性肝损伤】Ⅱ期临床研究总结
云教室课程行政伦理学行政良心

语文S版小学二年级语文下册诺亚方舟课件优质课教学课件
未来中考趋势作文考与练
近年来广东历史试题中考易错点分析与教学启示

搜索推广那些事

小学语文二年级上册红领巾真好说课稿设计(说课设计)

新课标人教版二年级语文上册红领巾真好课件

新课程背景下的高中化学课堂教学改革

危机管理与突发事件应对

背影朱自清教案课件二课时
突发公共卫生事件培训
统计学简史及数据科学中南财经大学

水泥混凝土路面技术现状及发展终
有家真好作文讲评课
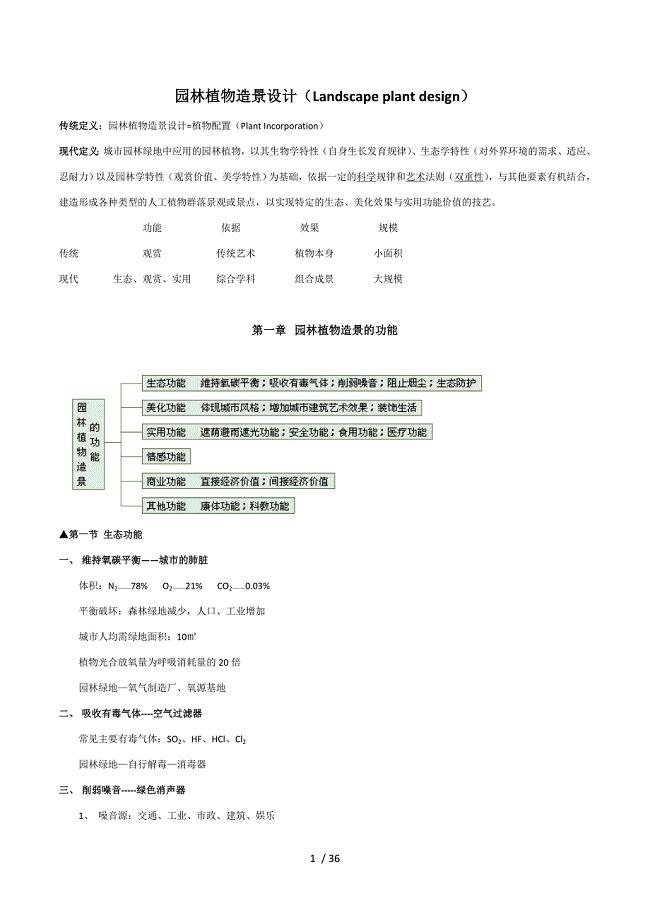
西南大学植物造景设计总复习
海外汉语教学新探索在线交流学习平台Goclef

动态黑色背景年终总结模板
孙子的治军之道与现代管理谋略总结
 交通安全 出行教育
交通安全 出行教育
2024-04-09 25页
蓝色卡通可爱风儿童开学季开学第一课PPT模板
2024-04-09 24页
春节里的寒假生活
2024-04-09 18页
家园同携手共赢幼升小
2024-04-09 29页
A-pioneer-for-all-people
2024-04-08 27页
校园防溺水安全知识
2024-04-08 21页
智慧跨境电商方案
2024-04-08 27页
数字孪生整体解决方案
2024-04-08 24页
儿童成语故事教育绘本 叶公好龙
2024-04-06 11页
赢战2024企业年会颁奖
2024-04-06 41页