
abb机器人控制器概述
40页
1、,机器人控制器概述 ROBOT CONTROLLER,控制系统 - 控制柜,扩展型,紧凑型,控制柜概述,1.控制柜门 2.主电源开关 3.LED指示板 4.控制面板 5.时间计数器 6.服务接口(可选) 7.示教器连接口 8.示教器悬挂架 9.示教器电缆悬挂架 10.开门手柄,扩展型,紧凑型,控制柜-内部板标识,AC1:柜门 AC2:柜的后壁和可选的Harting连接板 AC3:底板 AC4:转动单元 AC5:右侧壁(正视图) AC6:左侧壁(正视图) AC7:顶板,控制柜的后壁、侧壁和旋转单元等处, 有不同的元件、连接器和接线端子板。,(Covers removed),控制柜概述,控制柜元件位置-扩展型控制柜,控制柜元件位置-紧凑型控制柜,S4P+喷涂控制系统构成,构成: 计算机模块 轴驱动单元模块 机箱控制模块 分布式输入/输出&通讯模块 机械手模块 电源模块,控制系统计算机模块,计算机底板 主计算机 轴计算机 输入/输出计算机 存储器,计算机底板,闪盘,轴计算机,输入/输出计算机,主计算机,主计算机板指示灯状态,说明 查错/ 故障源 绿色 LED 电源 当板上通电时,亮绿色. 不
2、亮则检查电源,电缆和连接器. 黄色 LED 硬盘 当IDE总线有数据传送给硬盘时,黄灯闪烁. 红/绿LED 状态 LED 显示计算机在启动和运行时的状态. 在启动期间状态 LED 1 电源给电,闪烁红色. 2 主引导装载,固定红色 3 应用程序启动,闪烁绿色 4 运行中,固定绿色 当检测错误时,LED的状态 原因 保持闪烁红色 通电自检(POST)错误,严重的硬件(SBC)错误 保持固定红色 硬盘驱动器访问错误 保持闪烁绿色 SBC以外的硬件错误,应用软件被破坏 保持固定绿色 系统运行中,计算机模块-主计算机板DSQC500/540,控制系统驱动单元模块,驱动单元模块可包含1个或2个伺服驱动系统。第一个系统称作“主伺服驱动系统”,用来控制机械手的轴和可能在轨道上使用的台车。可选配的第二个系统,称作“辅助伺服驱动系统”,可用来操纵机械手内的(或者在外部控制柜中的)涂料泵,或者可用来控制CBS (Cartridge Bell System)系统。 驱动单元由轴计算机板、整流器、驱动单元以及串行测量单元等组成。 警告! 在运行当中,驱动单元内有危险电压(370VDC)。即使在电源切断的情况下
3、,该危险电压也存在于整流器板上,并因此贯穿驱动单元。在机器人的制动器断开情况之下,如果手动移动机器人手臂,则在驱动单元内就会产生危险电压,即使是在断电的时候也如此.,驱动系统构成: 整流器单元DSQC 345 马达驱动单元DSQC 346 驱动单元接线板CBG 伺服驱动接口单元ASDI 伺服驱动接口板SDI 伺服驱动接线板SDC 整流器VCP 串行测量单元SMU 测量系统接线板CBC 串行测量单元DSQC 562(SMB),控制系统驱动单元模块,驱动单元模块-整流器单元DSQC 345,输入电压: DC2,DC2/T 260VAC DC3 430VAC 输出电压: DC2,DC2/T 370VDC DC3 390VDC,驱动单元模块-电机驱动单元DSQC 346,规格 温度范围: 0-70 最高散热温度: 90 额定直流电压: 340V 最高直流电压: 380V 最高电源电压: 180V 所需的相电感: 2mH 整流交换频率: 5kHz,驱动单元模块-伺服驱动接口单元ASDI,ASDI单元是驱动系统单元的控制器,控制泵和 CBS系统。 这个单元由伺服驱动接口板SDI和伺服驱动连接 器板
4、SDC组成.,驱动单元模块-串行测量单元SMU,串行测量单元测量所有的电机位置,并将其反馈给轴计算机。 马达的位置是通过安装在每台马达上面的解码器来测量的。 串行测量单元SMU用在机械手的轴和CBS处理器上面。,控制系统机箱控制模块,机箱控制模块(Cabinet Control Module)由带有计算机板ACPX的机箱控制板ACCB和安装在该控制板上的风扇监视板FFB组成。 模块定位在控制柜的背板上。,机箱控制模块-机箱控制板ACCB,ACCB控制板是一个多功能控制板 功能: 各种CAN通道的分配。CAN 1.1用于外部通讯,而CAN 1.2用于机械手通讯。CAN 1和CAN 2都源自I / O计算机. 喷漆过程和通用目的的数字和模拟输入 / 输出。 信号通路。示教器通讯、串行I / O、到I / O和轴计算机的状态信号、串行测量装置、串行通讯、传动系统串行通讯以及ALED通讯都要通过ACCB控制板。 基本的、与安全相关的开关和继电器的自动监视。使用安全电路的双电路布局来检查安全信号差异。当出现电路差异情况时,必须确定故障条件,并要重现这样的故障条件,以使得以后能够启动自动监视信号。
《abb机器人控制器概述》由会员小**分享,可在线阅读,更多相关《abb机器人控制器概述》请在金锄头文库上搜索。
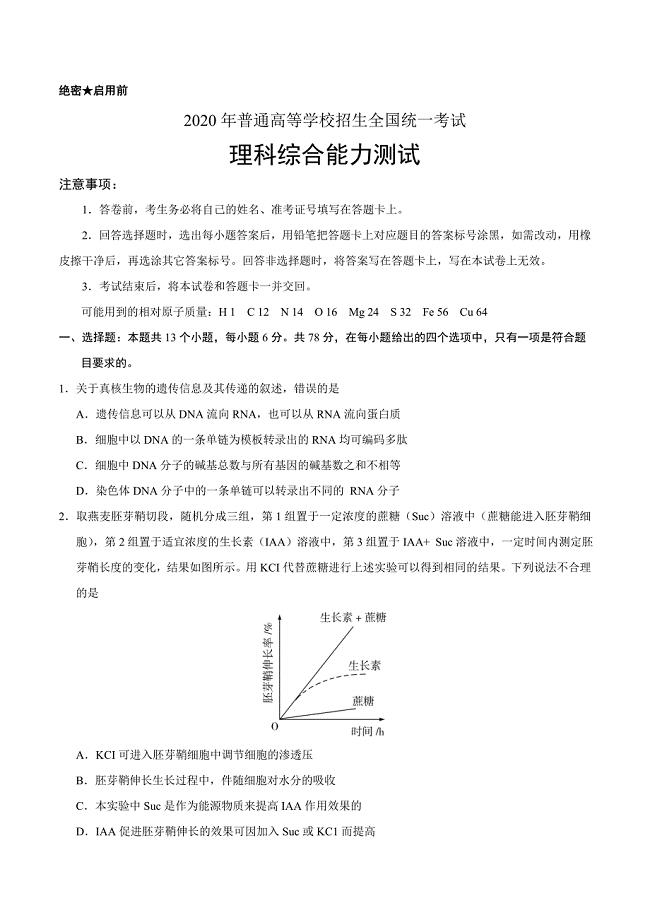
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 企业高效开会秘诀
企业高效开会秘诀
2024-01-31 15页
管理者的职责认知
2024-01-31 21页
高效会议秘诀培训PPT
2024-01-31 37页
项目管理流程(5大过程)
2024-01-31 30页
商业分析工具:战略分析与规划工具(精品)
2024-01-31 22页
商业分析工具:由商业问题到最终成果
2024-01-31 48页
管理者的自我成长
2024-01-31 32页
项目管理流程培训PPT
2024-01-31 40页
商业分析工具:销售数据分析方法
2024-01-31 31页
会议管理知识
2024-01-31 20页
广东省建筑装饰工程竣工验收技术资料统一用表水基防锈剂配方组成比例,防锈原理及配制方法辩论赛宁要大城市一张床,宁要小城镇一间房【2018年整理】动力气象吕美仲课后答案.pdf红楼梦后28回(癸酉本)金锄头网企业认证授权书(负责人非法人必须提供)服装设计助理实习周记制造机械项目投资分析报告(总投资15000万元)(78亩)计算机网络技术基础 教学课件 作者 阚宝朋 课件 第2章 网络体系结构与网络协议计算机网络技术基础 教学课件 作者 阚宝朋 课件 第5章 网络层与网络互联计算机网络技术基础 教学课件 作者 阚宝朋 课件 第1章 网络基础知识输煤管道生产建设项目可行性研究报告